در این نوشته یادمیگیرید چطوری سنسور فاصله سنج التراسونیک رو با STM32 راه اندازی کنید ، با برنامه ای که در اون تابع دیرکرد ( تاخیر ) وجود ندارد .


آشنایی با چگونگی کارکرد سنسور دوری سنج التراسونیک HC-SR04 ( حسگر دوری سنج فراسدا )
حسگر دوری سنج فراسدا (التراسونیک) HC-SR04 ، برای اندازه گیری دوری از 2 تا 400 سانتی متر بکار میره. این حسگر چهار پایه داره :
- پایه ی VCC = 5v
- پایه زمین
- پایه ی اکو
- پایه ی تریگر
بسامد نمونه برداری این حسگر هم 60ms هست ، هر 60 میلی ثانیه میتونیم دوری رو اندازه بگیریم .
چگونگی کارکرد
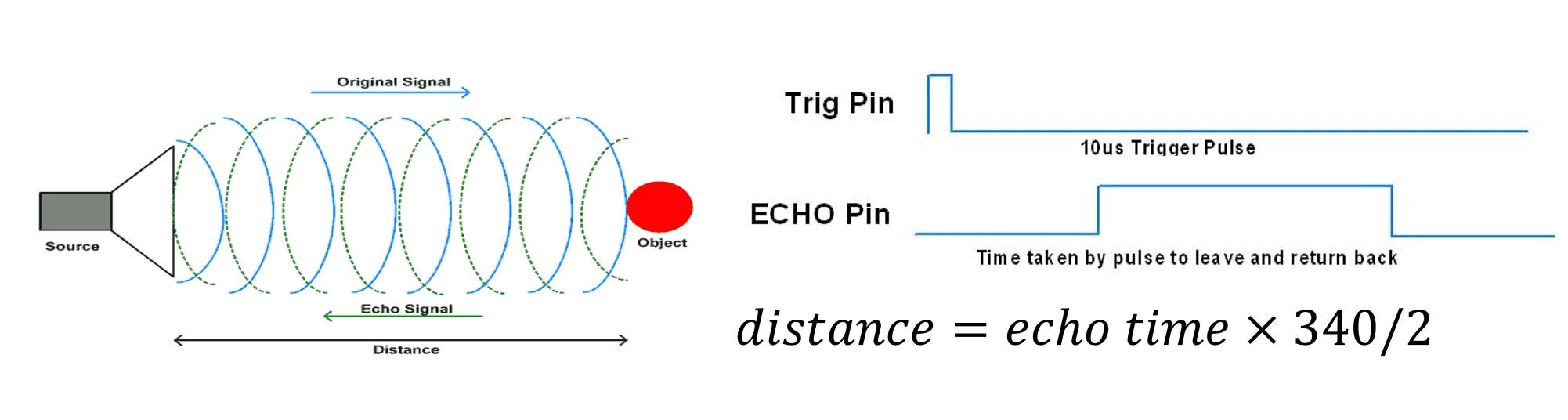
- برای آغاز هر اندازه گیری باید به اندازه 10us پایه ی trig رو یک کنیم. تا حسگر فرستادن موج های فراسدا رو آغاز کنه .
- حسگر موج های فراسدا میفرسته و همزمان با آغاز فرستادن موجهای فراسدا ، پایه ی echo رو یک میکنه.
- این موجها به چیزها میخورند و به سوی حسگر برمیگردند و حسگر موج ها رو دریافت میکنه ، هنگامی که حسگر موج ها رو دریافت کرد ، پایه ی echo رو هیچا ( صفر ) میکنه .
- از روی زمان یک بودن پایه ی echo که همان زمان سپری شده برای رفتن و برگشتن موج هاست ، دوری چیزها از حسگر رو بدست میاریم.
- چون تندی سدا در هوا 340m/s است ، با فرمول زیر میتوان دوری چیز از حسگر را بدست آورد .
چگونگی کارکرد تایمر برای فرستادن و دریافت جهند ( پالس ) به سنسور دوری سنج HC-SR04
- در این پروژه ، SR04 را با STM32 با روشی راه اندازی میکنیم که AVR نمیتونه ، چون تایمر های AVR توانایی تایمر های STM32 رو ندارند .
- هنگامی که تنها یک قطعه رو با میکروکنترلر راه اندازی میکنید، وجود کارنوشت دیرکرد ( تابع تاخیر یا delay ) در برنامه مشکل ساز نیست . ولی وقتی پروژه شلوغ میشه ، هزار تا مشکل درست میکنه . قدرت STM32 هم به همینه که میتونی delay بکار نبری.
- اگر بلد باشی چجوری از امکانات پیرارونگ ها ( پریفرال ها ) استفاده کنی ، میشه در پروژه delay بکار نبرد .
در راه اندازی حسگر دوری سنج فراسدای HC-sr04 با میکروکنترلر STM32 ، به پایه های GPIO نیاز نداریم و نیازی نیست که خود CPU بخواهد پایه های تریگ را 0 و 1 کند یا زمان یک بودن پایه ی echo را اندازه بگیرد . بلکه همه ی این کارها را پیرارونگ ( پریفرال ) تایمر انجام میدهد .
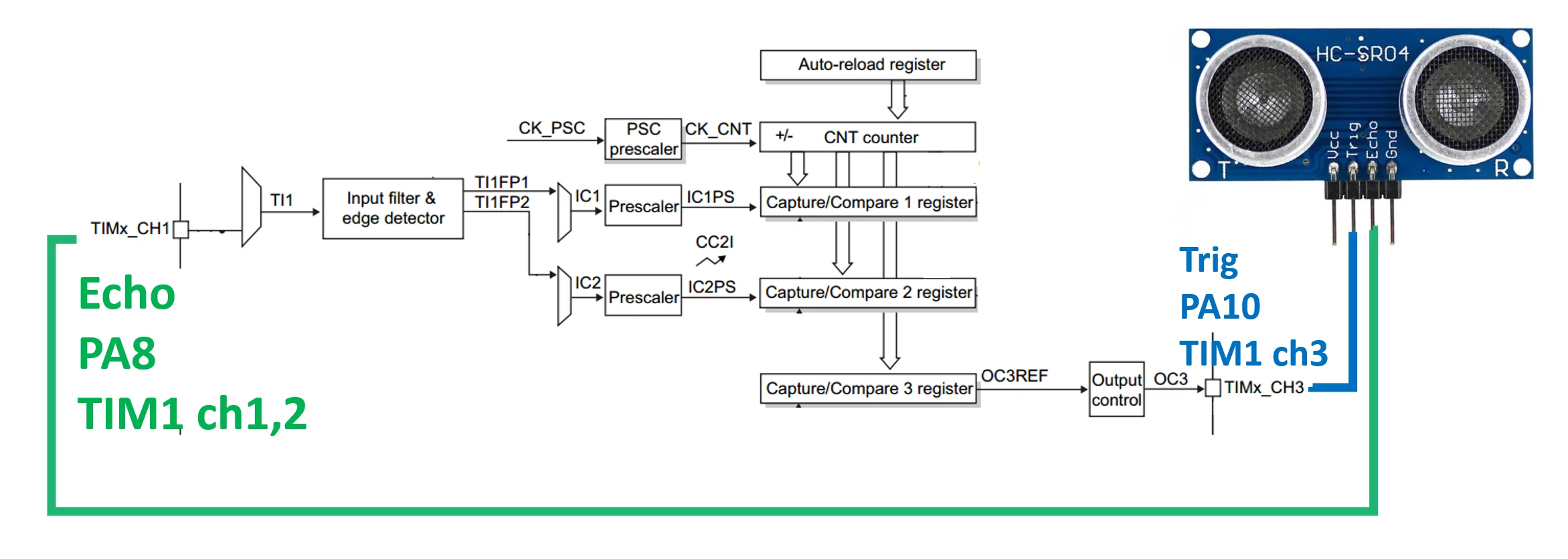
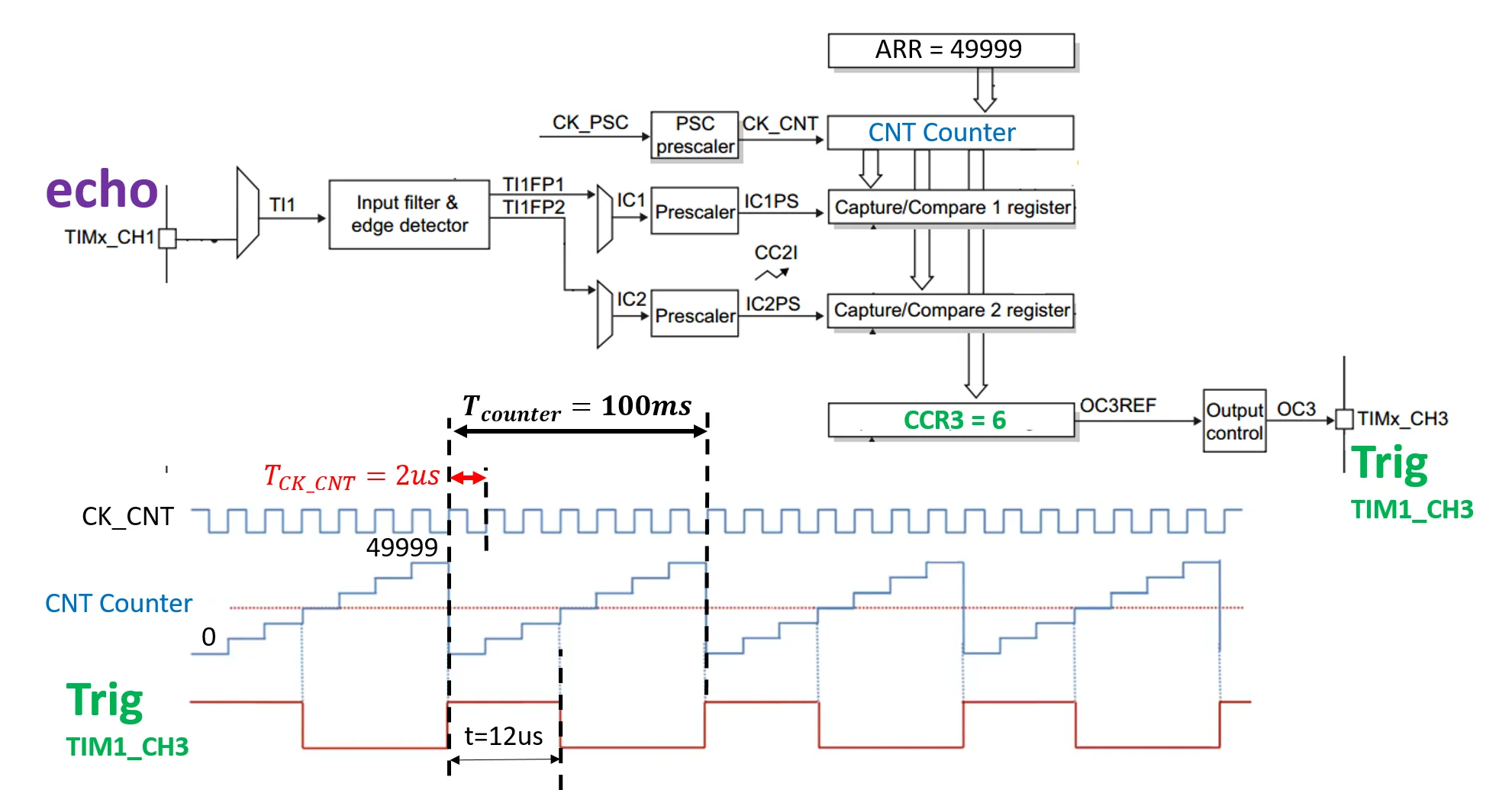
کانال 3 تایمر یک در کارگون PWM ( حالت کاری ) رو برای ساخت پالس تریگ هر 100ms بکار میبرم . تا این کانال هر 100 میلی ثانیه یک جهند ( پالس ) 10us روی پایه ی تریگ بیندازد.
کانال 1 و 2 تایمر یک رو در کارگون IC input capture برای اندازه گیری زمان یک بودن جهند ( پالس ) روی پایه ی echo بکار میگیرم .
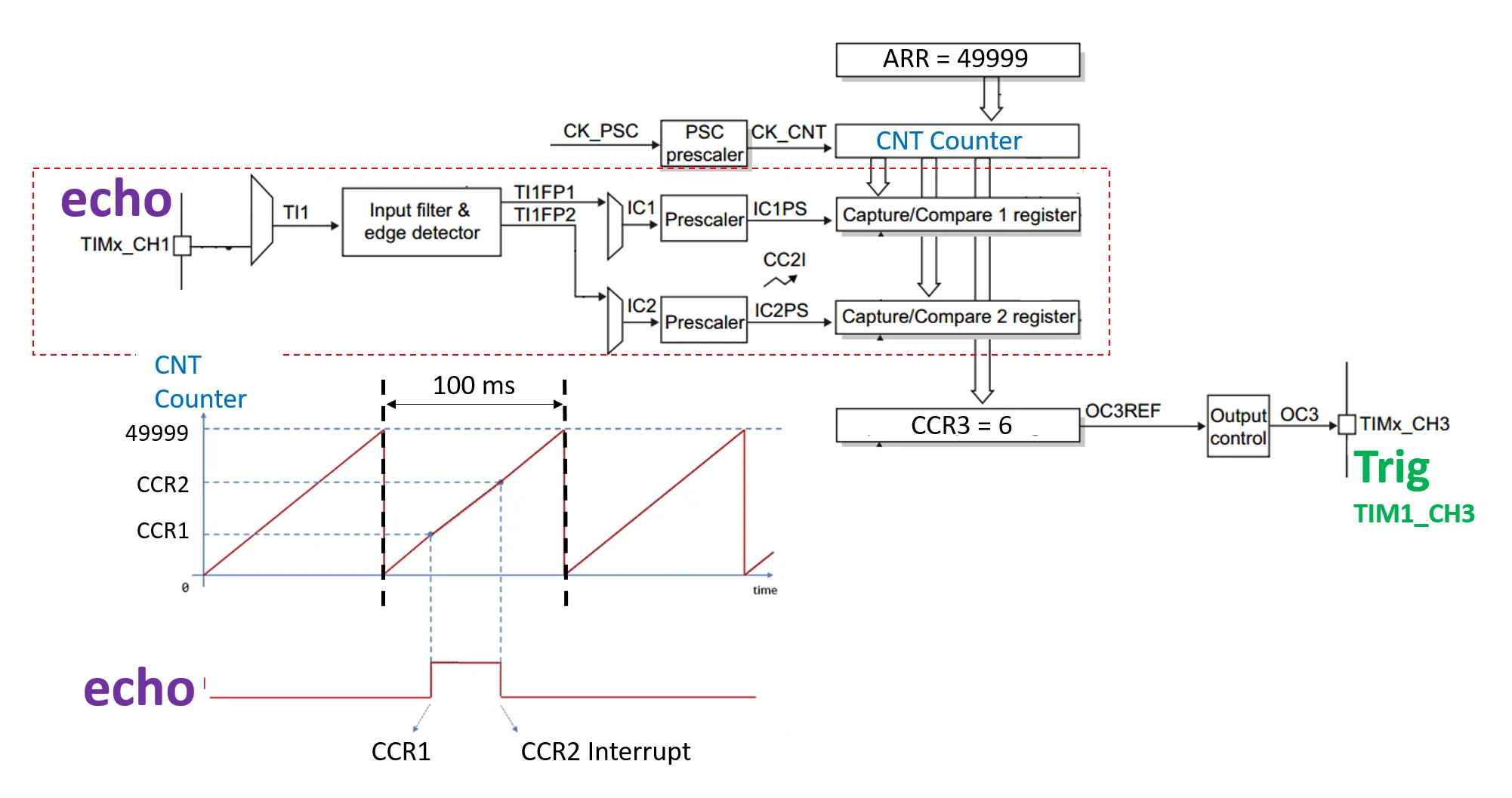
کانال 3 تایمر ، جهند ( پالس ) تریگر رو میفرسته و کانال های 1 و 2 هم هنگامی که لبه روی پایه ی اکو رخ میده ، اندازه ی شمارنده ( رجیستر CNT ) رو برمیدارند ، در اینتراپ ( بازداری ) کانال 2 تایمر ، با کم کردن اندازه ی CCR1 از CCR2 زمان یک بودن جهند اکو بدست میاد .
- در راه اندازی SR04 با AVR ، بخش CPU میکروکنترلر از آغاز تا پایان نمونه برداری درگیر کار هست.
- در راه اندازی SR04 با STM32 ، بخش CPU میکروکنترلر تنها در پایان نمونه برداری باید یک عملیات تفریق انجام بده .
اگر میخواهید یادبگیرید که از پایه چجوری باید این کتابخونه رو بنویسید ، دوره ی آموزش پیشرفته ی STM32F103 رو ببینید .