در حالت کاری PR در سروو موتور دلتا A2، روندی (procedure) هست برای تندی پایا (سرعت ثابت) یا constant speed ، در این نوشته، هم این روند رو یادمیگیرید و هم روش های گوناگون فراخوانی یک روند تا از انجام روند دیگری بازداری کند.

آشنایی با روند تندی پایا ( constant speed ) در سروو موتور دلتا
برای روند های تندی پایا، باید 4 بیت کم ارزش پارامتر ویژگی دهی (پارامتر definition) ، 1 باشد. در آغاز این روند، تندی موتور افزایش یا کاهش میابد تا به تندی نوشته شده در پارامتر داده برسه، پس از رسیدن موتور به تندی در پارامتر داده ، انجام دستور پایان یافته و پس از اون موتور با تندی پایا میچرخه و نمی ایسته .
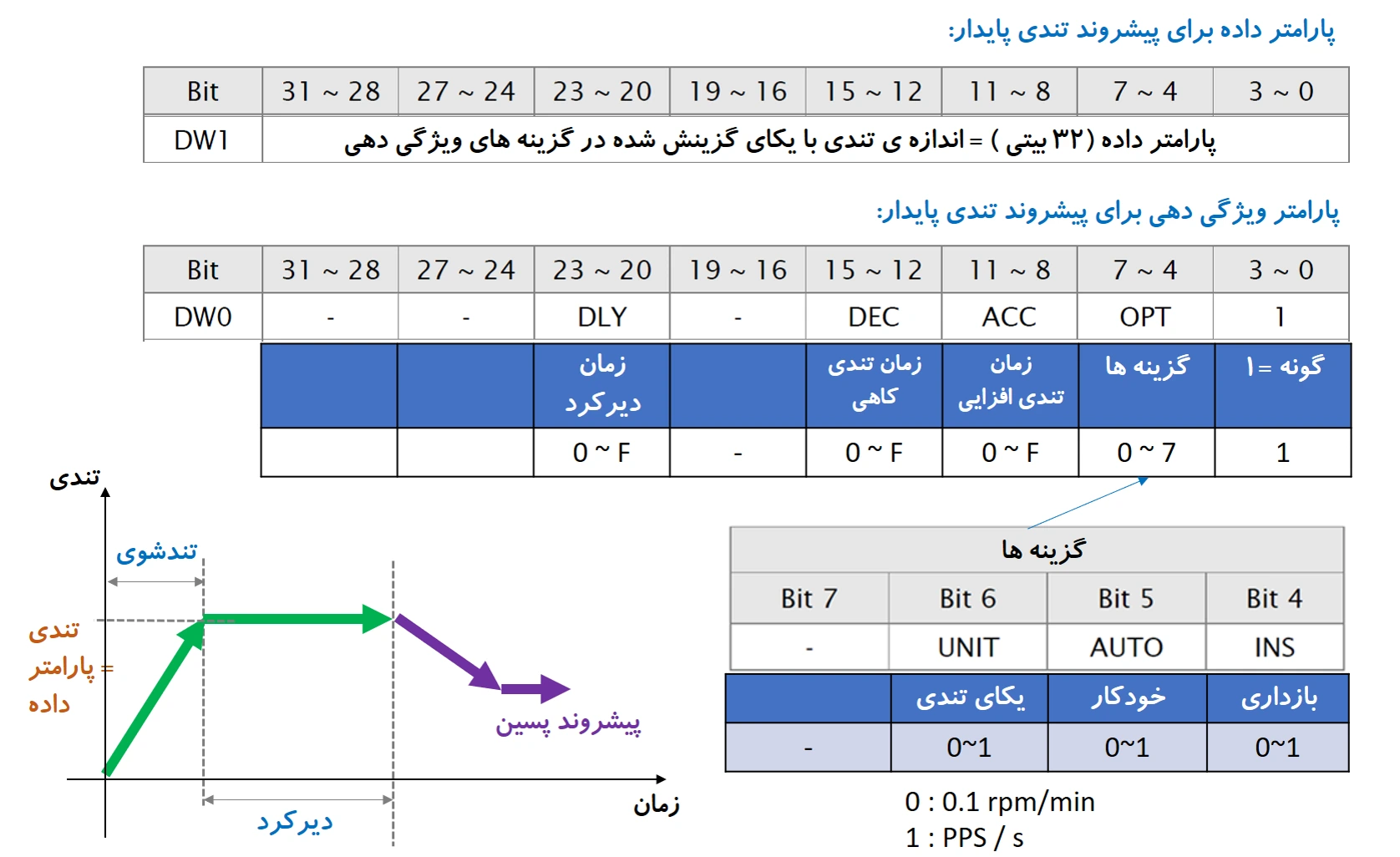
یکای تندی:
- اگر 0 : یکای تندی 0.1 چرخه بر دقیقه (r/min) است.
- اگر 1 : یکای تندی PPS (یکای پالس کاربر) بر ثانیه است.
خودکار : اگر دستور خودکار باشه، دستور با شماره ی بعدی، پس از رسیدن به تندی و سپس سپری شدن زمان دیرکرد، آغاز میشود. برای نمونه، اگر روند 3 خودکار باشد، پس از آن روند 4 خودکار آغاز میگردد.
بازداری : اگر یک باشه، این روند میتونه از انجام روند پیشین خودش جلوگیری کنه و خودش آغاز بشه.
فراخوانی پیشروند بازدار در کارگون PR سروو موتور دلتا
بپندارید که روند یکم دارد انجام میشود، کی روند دوم از انجام آن بازداری می کند و خودش آغاز می شود؟
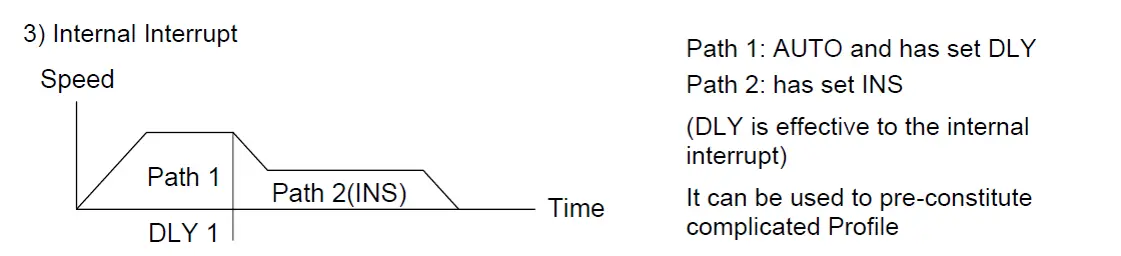
1 – بازداری از درون با دیرکرد در سروو درایور دلتا:
با این روش تنها زمانی روند دوم میتواند از یکم بازداری کند، که :
- روند یکم خودکار باشد.
- روند دوم بازدار باشد.
- شماره های روند ها پشت هم باشد.برای نمونه، با این روش تنها روند 4 میتواند از روند 3 بازداری کند.
با این تنظیمات، کارکرد زمان دیرکرد دگرگون شده و روند یکم تنها در زمان دیرکرد خودش زمان دارد تا انجام شود و پس از زمان دیرکرد، روند دوم آغاز میشود.
کارکرد زمان دیرکرد چگونه دگرگون شد؟
- اینجا دیگر دیرکرد از پایان پیشروند یکم برآورد نمیشود، بلکه از آغاز آن براورد میشود.
- اگر دیرکرد روند یکم صفر باشد، روند یکم انجام نشده (آغاز هم نمیشود) و یکراست میرویم به روند دوم.
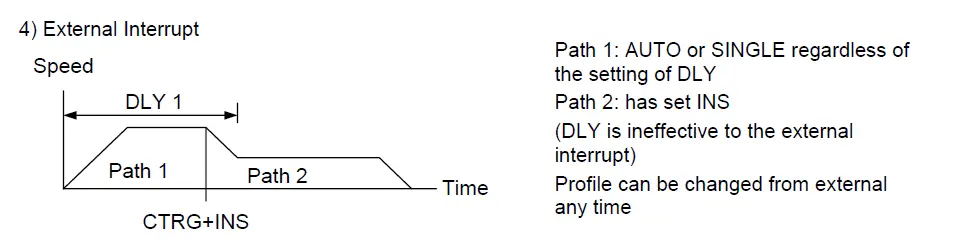
2- بازداری از بیرون با فرمان های آغاز در سروو درایور دلتا:
- روند یکم خودکار یا تکی.
- روند دوم بازدار.
- دو روند میتوانند پشت هم نباشند، برای نمونه روند 10 میتواند از روند 5 بازداری کند.
در هنگامی که روندی انجام نمیشود، میتوان با فرمان های آغاز، هر روندی را فراخوانی کرد. ولی هنگامی که روند یکمی دارد انجام میشود، تنها هنگامی فرمان های آغاز میتوانند، از انجام آن بازداری کند و روند دوم را فراخوانی کند، که بیت بازدار در روند دوم، یک باشد.
آزمایش بازداری از روند در سروو موتور دلتا A2
برای اینکه بازداری رو یادبگیرید و روند های تندی پایا (سرعت ثابت) رو هم بکاربگیریم، میخواهیم سه آزمایش انجام دهیم. در هر آزمایش، سه روند پیاپی خواهیم داشت.
- روند شماره صفر ( PR0 ) : روند خانه که پس از آن خودکار روند 1 فراخوانی میشود.
- روند شماره یک (PR1) : روند تندی پایا ، که با سه روش بازداری در سه آزمایش، روند های 2 یا 3 یا 51 از انجام روند 1 بازداری میکنند.
- روند شماره 2 یا 3 یا 51 ( PR2 or PR3 or PR51 ) : هر سه از گونه تندی پایا بوده و هرکدام را یک جور فراخوانی میکنیم تا با روش های گوناگون از روند 1 بازداری کنیم.
روند سوم در هر یک از سه آزمایش :
آزمایش 1: روند سوم = روند شماره 2 (PR2) ، که با بازداری درونی با دیرکرد از روند 1 (PR1) بازداری میکند. در بازداری درونی با دیرکرد تنها روند با شماره ی بعدی میتواند از روند 1 بازداری کند (تنها روند شماره 2 میتواند از 1 بازداری کند).
آزمایش 2 : روند سوم = روند شماره 3 (PR3) ،که با بازداری بیرونی با پایه های CTRG + POS 0 & POS1 فراخوانی شده و از روند 1 بازداری میکند. با این روش هر روندی میتواند از روند شماره 1 بازداری کند.
آزمایش 3 : روند سوم = روند شماره ی 51 ( PR51 ) ،که با بازداری بیرونی با پایه ی EV1 فراخوانی شده و از انجام روند 1 بازداری میکند. با این روش تنها روند های 51 تا 63 میتوانند از روند 1 بازداری کنند.
گام به گام آزمایش های بازداری :
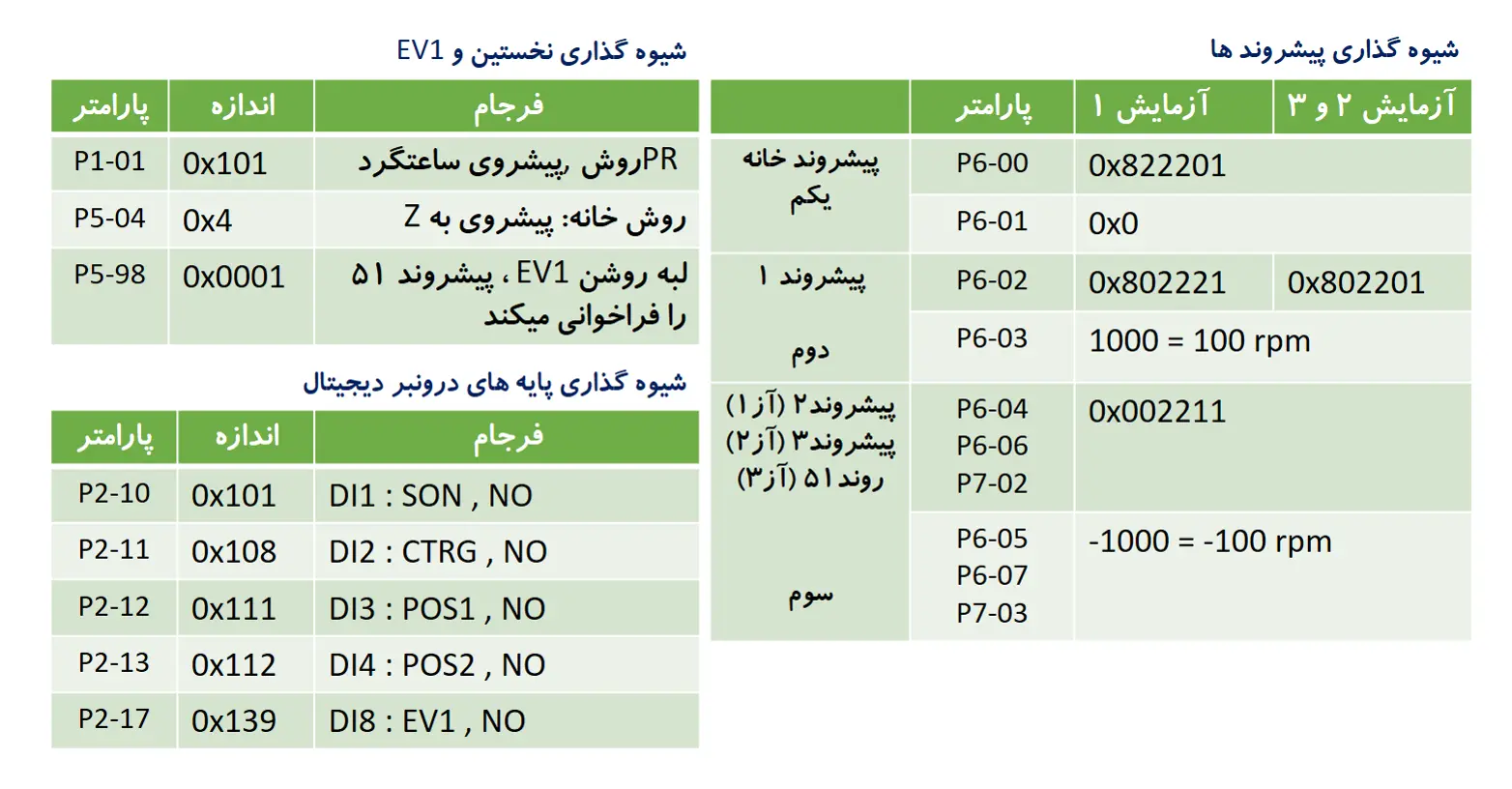
نخست اندازه هایی که در جدول براتون نوشتم رو در پارامتر ها بنویسید. و سپس :
- پایه ی SON را روشن کنید.
- با خاموش کردن پایه های POS0 و POS1 روند PR0 را گزینش کنید.
- با لبه ی روشن شو پایه ی CTRG ، روند PR0 رو فراخوانی کنید.
پس از پایان روند صفر (PR0) ، 2 ثانیه دیرکرد داریم و سپس روند یک (PR1) خودکار فراخوانی میشود و موتور با تندی 100 rpm میچرخد. در ادامه میگویم در هر آزمایش چه کنیم….
آزمایش 1: بازداری درونی با دیرکرد از روند در سروو موتور دلتا
لازم نیست کاری کنید، موتور دو ثانیه زمان دارد برای روند 1 (PR1) و در این زمان موتور به 100 rpm میرسد. پس از دو ثانیه، روند 2 (PR2) از روند 1 بازداری کرده و خودش آغاز میشود و موتور با -100 rpm میچرخد و دیگر نمی ایستد.
آزمایش 2: بازداری بیرونی با CTRG + POS0 , POS1 در سروو موتور دلتا
پس از انجام روند خانه (PR0) و سپری شدن دیرکرد آن ، روند 1 (PR1) فراخوانی میشود و اگر کاری نکنیم این روند پایان نمی یابد و موتور تا ته دنیا با تندی 100 rpm میچرخد. برای فراخوانی روند 3 باید:
4. دو پایه ی POS0 و POS1 را روشن کنید تا روند 3 گزینش گردد.
5. با لبه ی روشن شو پایه ی CTRG روند 3 فراخوانی میشود و این روند از انجام روند 1 بازداری میکند.
با روند 3 موتور با تندی -100 rpm میچرخد و دیگر نمی ایستد.
آزمایش 3: بازداری بیرونی با پایه ی EV1
باییستی روند 51 را فراخوانی کنیم که از روند 1 بازداری کند:
4. با لبه ی روشن شو پایه ی EV1 ، روند 51 فراخوانی شده و از روند 1 بازداری میکند.
نکته : اگر روند شماره 1 ، خودکار باشد، پس از آغاز این روند تنها 2 ثانیه زمان دارید تا یکی از روند های 3 یا 51 را فراخوانی کنید و اگر نکنید ، روند 2 فراخوانی میشود.

