در این نوشته، روند رفتن به جایگاه رو برای سروو موتور دلتا A2 یادمیگیرید. در این روند، یک جایگاه به درایور دلتا میدیم که موتور رو به اونجا ببره.

آشنایی با رفتن به جایگاه در سروو موتور دلتا
نمای پارامتر ویژگی دهی ( definition ) برای روند های رفتن به جایگاه در سروو درایور دلتا رو میبینید، کم ارزش ترین چهار بیت type یا گونه نام دارد، اگر گونه 2 یا 3 باشد، روند، کارکرد رفتن به جایگاه را دارد:
- گونه 2 : رفتن به جایگاه تکی، پس از آن، روند دیگری خودکار آغاز نمیشود.
- گونه 3: رفتن به جایگاه خودکار، پس از پایان این روند، روند با شماره بالاتر خودکار آغاز میگردد، برای نمونه اگر روند8 (PR8) خودکار باشد(از گونه 3) پس از آن روند 9 (PR9) خودکار آغاز خواهد شد.
در گذشته با زمان های تندی افزایی و و تندی کاهی و دیرکرد و همچنین اندازه ی تندی آشنا شدید. در ادامه میپردازم به چهار بیت OPT یا گزینه ها در پارامتر ویژگی دهی.

گونه های دستور رفتن به جایگاه بر پایه ی روش اندازه دهی جایگاه هدف
با بیت های 6 و7 در پارامتر ویژگی دهی میتوان یکی از چهار گونه دستور جایگاه در حالت PR در سروو موتور دلتا را گزینش کرد، اینها چیست؟
- رفتن به جایگاه مطلق یا absolute position command
- رفتن به جایگاه افزایشی یا incremental position command
- رفتن به جایگاه نسبی یا relative position command
- رفتن به جایگاه capture یا capture position command
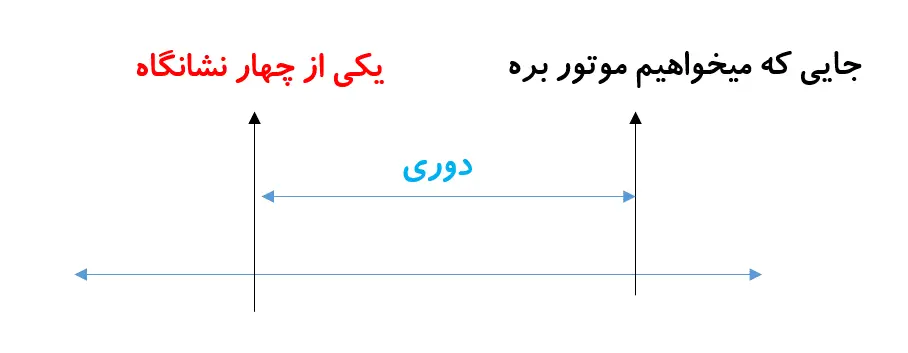
جایگاهی که میخواهیم موتور به آنجا برود ، با دو چیز گزارش میشود:
- یک فاصله: نوشته شده در پارامتر داده.
- از یکی از چهار جایگاه مرجع گزینش شده در پارامتر ویژگی دهی.
جایگاه مرجع؟ یک جایگاهی که درایور نشانی اش را میداند. و اینکه مرجع چه باشد، گونه دستور رفتن به جایگاه را میسازد. چهار مرجع:
- مبدا -> دستور جایگاه مطلق یا absolute .
- جایگاه هدف کنونی -> دستور جایگاه افزایشی یا incremental .
- جایگاه کنونی (فیدبک از انکودر) -> دستور جایگاه نسبی یا relative .
- جایگاه capture -> دستور جایگاه capture .
روند های رفتن به جایگاه و پارامتر نمایشی آماجگاه در سروو درایور دلتا
- جایگاه هدف یا Cmd_E یک پارامتر نمایشی با شماره ی 64 هست.
- جایگاه هدف اون جایی هست که میخواهیم موتور با دستور جایگاه به آنجا برسد.
- پارامتر جایگاه هدف، تنها در آغاز هر دستور جایگاه، بدست خود درایور اندازه دهی نو میشه و پس از اون دست نمیخوره.
- جایگاه هدف نسبت به مبدا نخستین بیان میشود.
در دستورهای رفتن به جایگاه، اون جایی که میخواهیم موتور به آنجا بره، با فاصله از مبدا اندازه دهی نشده. بلکه جایگاه هدف با دوری از یکی از چهار مرجع گزارش شده. و جایگاه هدف نسبت به مختصات مبدا باید بدست آید .
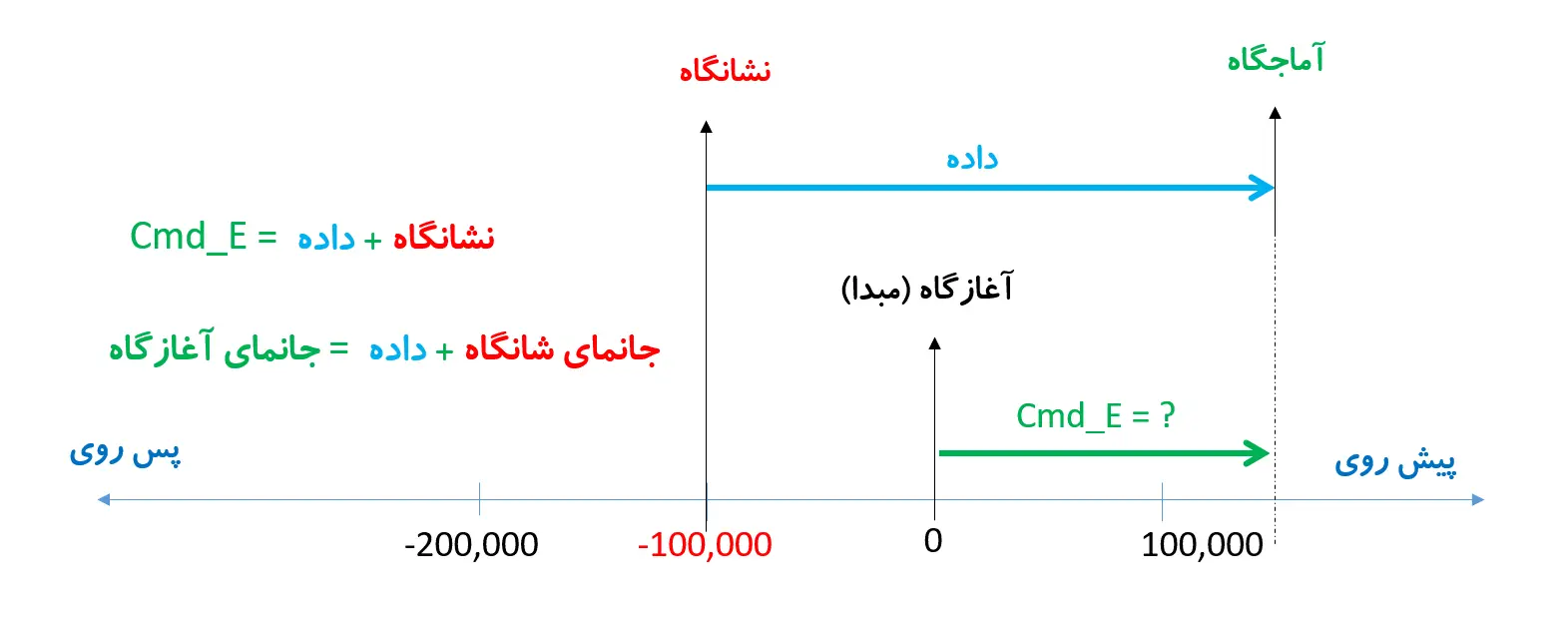
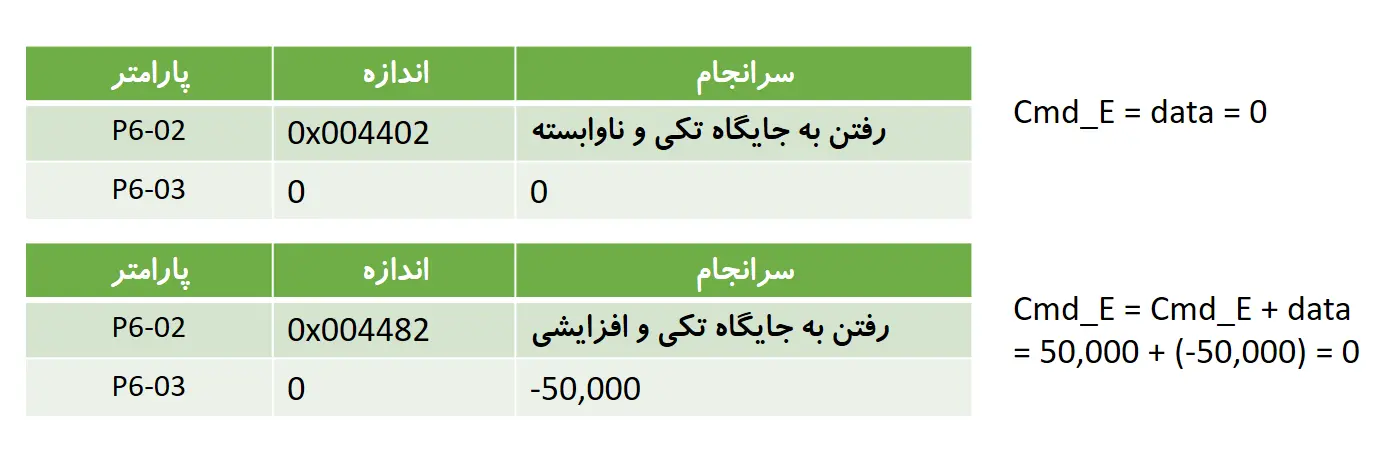
در دفترچه ی راهنمای سروو درایور دلتا همچین جدولی آورده شده. در این جدول ، اندازه ی جایگاه هدف رو برای دستور های رفتن به جایگاه مطلق و افزایشی براورد کرده.

دستور جایگاه مطلق- absolute : جایگاه Cmd_E ، ناوابسته به جایگاه های دیگر است چون جایگاهی که میخواهیم موتور به آنجا رود، از همان مبدا نخستین اندازه دهی شده.
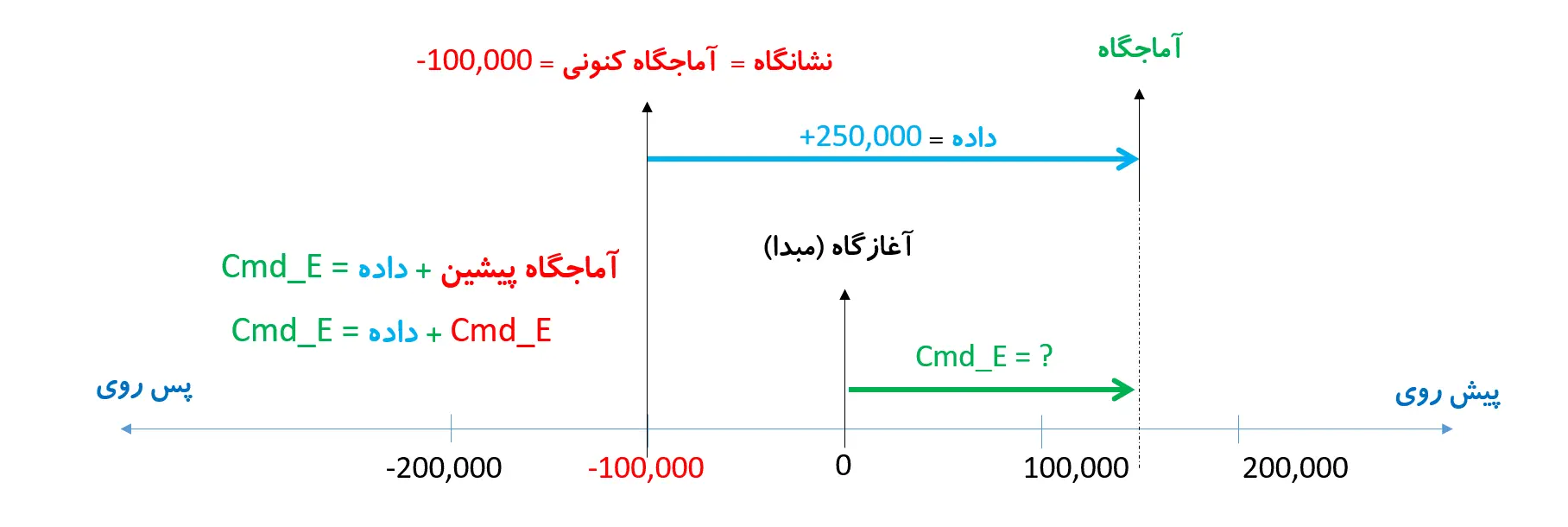
دستور جایگاه افزایشی (incremental) : جایگاهی که میخواهیم موتور به آنجا رود، از Cmd_E (جایگاه هدف) کنونی گزارش شده است. نکته: جایگاه هدف کنونی شاید جایگاه کنونی موتور باشد یا شاید نباشد.
پیوند دو روند پشت هم در حالت کاری PR سروو موتور دلتا
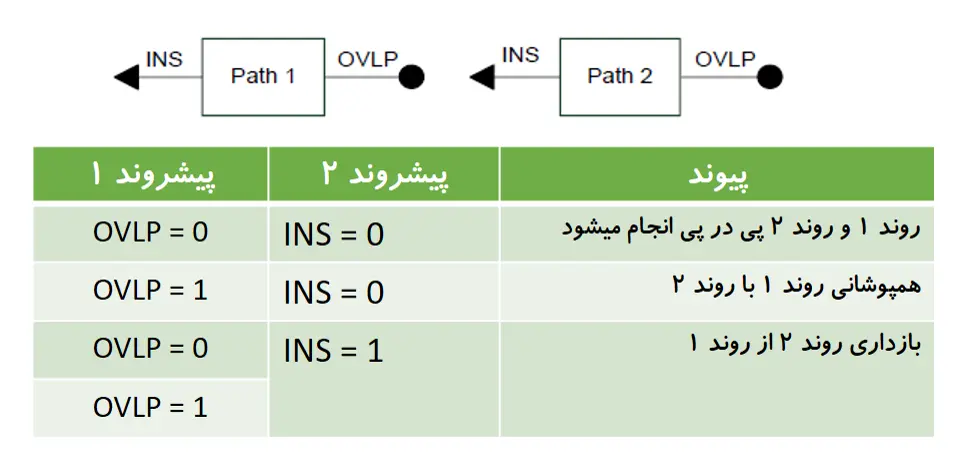
هنگامی که برای یک روند….
- بیت OVLP = 1 : این روند با روند بعدی خودش همپوشانی میکنه.
- بیت INS = 1 : این روند از انجام روند قبلی خودش بازداری میکنه.
سه رویداد میتونه میان دو روند رخ بده که در جدول زیر نمایان است:
همپوشانی با بعدی
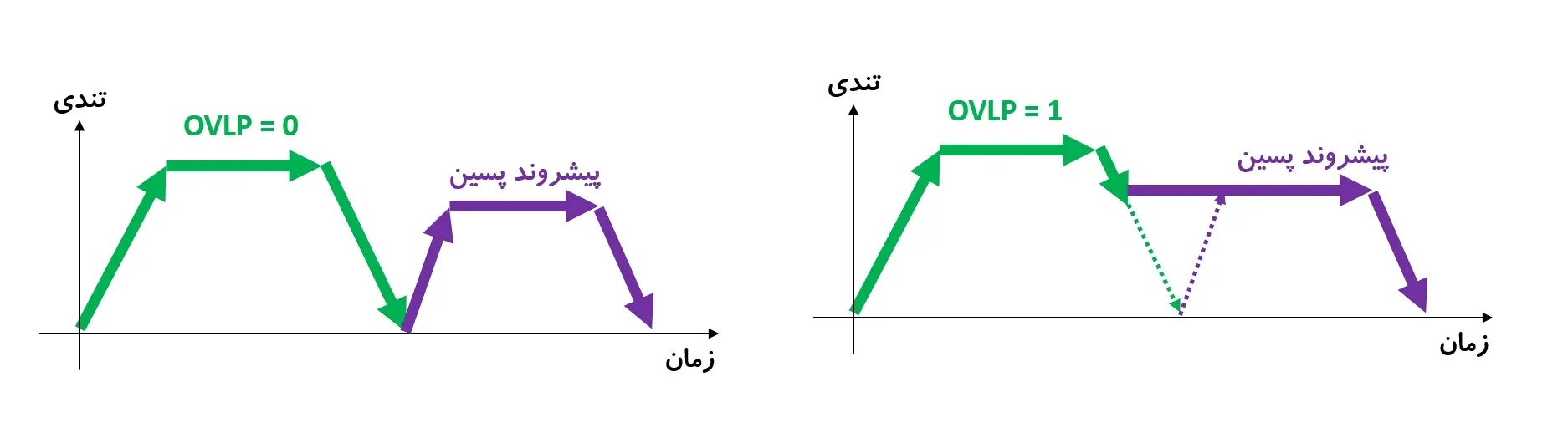
هنگامی میشود این ویژگی را بکار گرفت که دو دستور کنونی و بعدی، همسو بگردند، نه اینکه یکی ساعتگرد و دیگری پادساعتگرد باشد.
با یک کردن بیت OVLP ، در انتهای روند، تندی صفر نمیشود و موتور نمی ایستد، بلکه تندی از تندی کنونی به تندی روند روند تغییر میکند.
بازداری از قبلی
اگر در یک روند، بیت بازداری یا INS روشن باشد، این روند میتواند از انجام روند دیگری بازداری کرده و خودش آغاز شود. در آزمایش های روند های تندی پایدار، روش های گوناگون فرواخوانی روند بازدارنده، آزمایش شد:
- بازداری درونی با دیرکرد
- بازداری بیرونی با پایه های CTRG + POS0 ~ POS5
- بازداری بیرونی با رویداد لبه بالارو یا پایین رو روی پایه های EV1 ~ EV4
برای یادگیری روش های گوناگون فراخوانی روند بازدار ، به نوشته ی ” آموزش روند تندی پایا در سروو موتور دلتا “ بروید.
آزمایشگاه رفتن به جایگاه position control در سروو موتور دلتا
سه آزمایش میخواهیم انجام بدیم با روند های رفتن به جایگاه.
- رفتن به مبدا پس از انجام دستور homing
- همپوشانی بین دو دستور رفتن به جایگاه مطلق (absolute)
- بازداری از یک دستور مطلق با سه گونه دستور مطلق و افزایشی (incremental) و نسبی (relative)
رفتن به مبدا پس از انجام homing در سروو موتور دلتا
میخواهیم آزمایش های زیر را انجام دهیم یکبار هنگامی که P6-00 صفر باشد و یکبار هنگامی که نباشد.
- پس از دستور خانه ، با یک دستور رفتن به جایگاه افزایشی (incremental) به مبدا بروید.
- پس از دستور خانه، با یک دستور رفتن به جایگاه مطلق (absolute) به مبدا بروید.
یادآوری 1 :
- خانه جایگاه موتور است، هنگامی که در روند homing یک لبه روی یک پایه رخ داده.
- مبدا، جایگاه با مختصات 0 است، که از جایگاه خانه با بکارگیری پارامتر P6-01 اندازه دهی میشود.
- تنها هنگامی که P6-00 = 0 باشد، خانه و مبدا یکجا هستند.
- جایگاهی موتور می ایستد، پس از انجام دستور خانه، کمی جلوتر یا عقبتر از خانه است، وابسته به اینکه از کدام سو به خانه رسیده.
- هر چه تندی در روند خانه بیشتر باشد، موتور دورتر از خانه می ایستد.
یادآوری 2 :
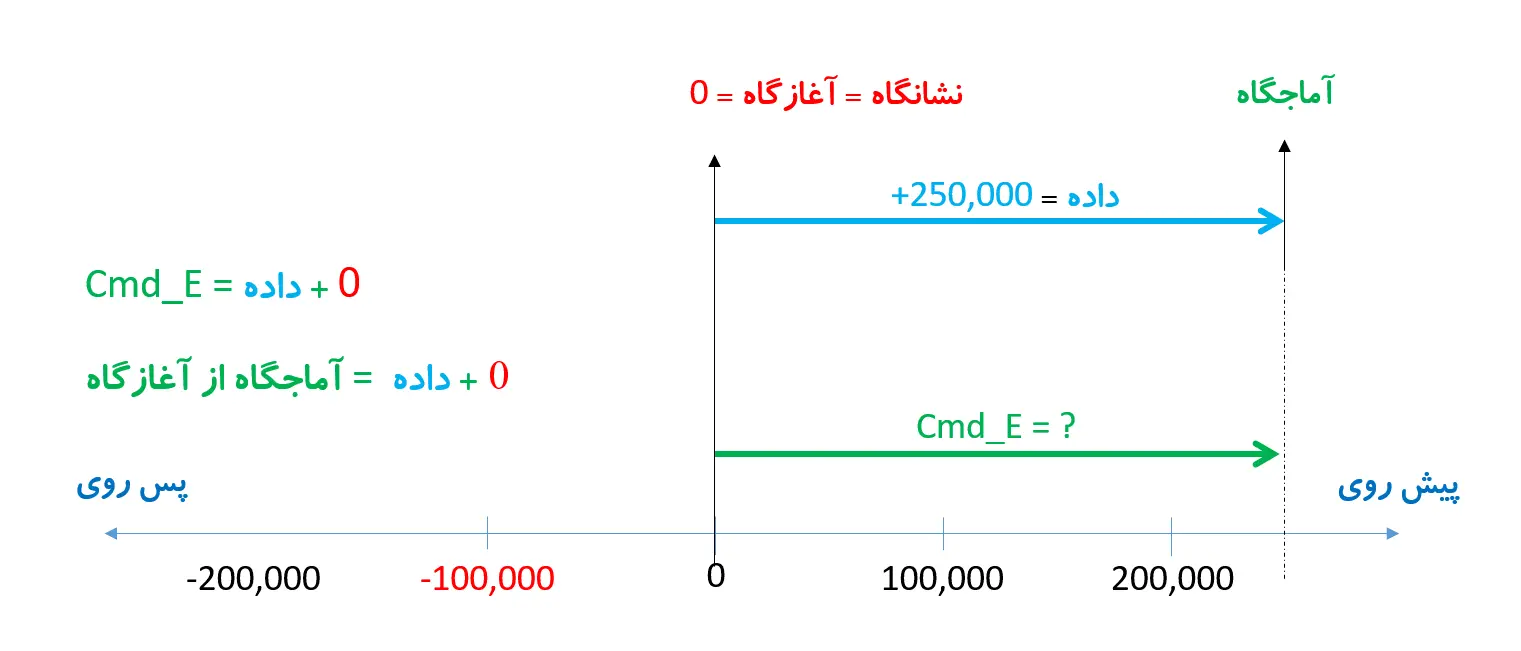
- مختصات مبدا 0 است.
- اگر بخواهیم به مختصات 0 برویم، جایگاه هدف یا Cmd_E باید 0 باشد.
- پس از انجام دستور خانه، Cmd_E = P6-01.
در آغاز، روند خانه را تنظیم میکنیم که پس از انجام آن با دیرکرد 1s روند شماره یک فراخوانی شود. روند شماره یک از گونه رفتن به جایگاه تکی خواهد بود و یکبار مطلق (absolute) و یکبار افزایشی (incremental).

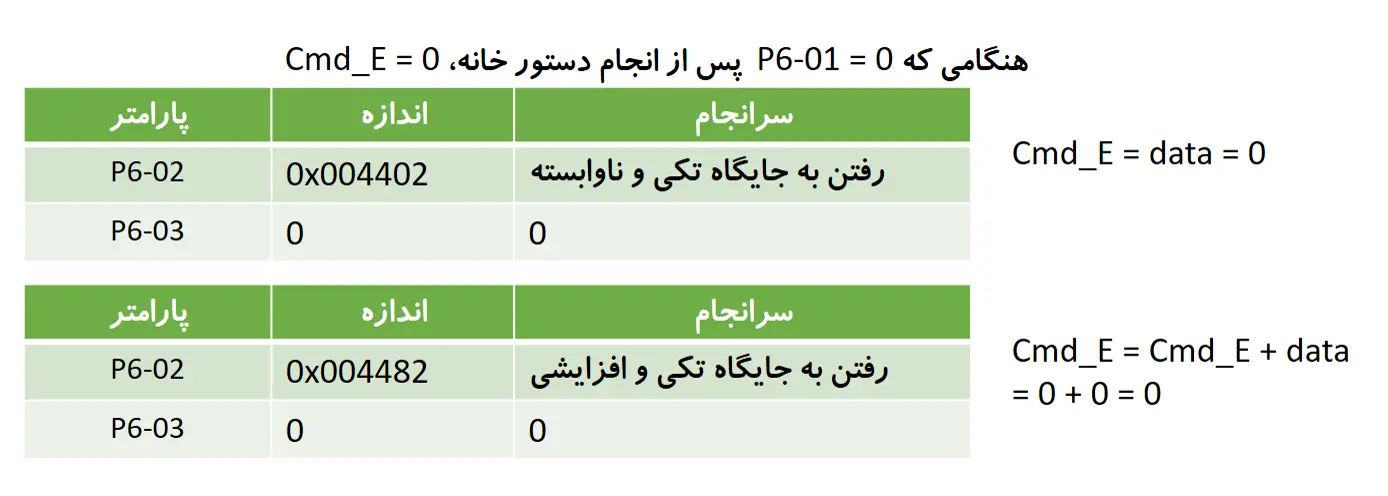
اگر P6-01 = 0 باشد:
پس از انجام دستور خانه Cmd_E = 0 است و برای هر دو دستور افزایشی و مطلق باید پارامتر داده صفر باشد تا پس از دستور خانه، ما را به مبدا ببرد.زیرا:
- برای مطلق: داده = Cmd_E = 0 و اینجوری به مبدا میریم.
- برای افزایشی : داده + Cmd_E = Cmd_E = 0 و چون اندازه ی Cmd_E =0 باز هم جایگاه هدف 0 میشود و به مبدا میرویم.
اگر P6-01 = 50000 باشد:
- پس از انجام دستور خانه P6-01=50000 و برای مطلق باز هم باید داده صفر باشد، چون جایگاه هدف = داده و هنگامی که جایگاه هدف صفر باشد، به مبدا میرویم چون مختصات مبدا صفر است.
- برای افزایشی باید داده = -50000 باشد، چون پس از دستور خانه، اندازه ی Cmd_E جایگاه خانه و Cmd_E = P6-01 موتور پس از خانه ایستاده و مبدا هم 50000 PUU پیش از خانه است.
آزمایش همپوشانی دو روند رفتن به جایگاه در سروو موتور دلتا
میخواهم دو دستور مطلق را پشت هم انجام دهیم تا ببینیم هنگامی که بیت همپوشانی یک باشد چه میشود، برای اینکه در این آزمایش، صفر شدن تندی را در بین دو دستور ببینیم، بایستی:
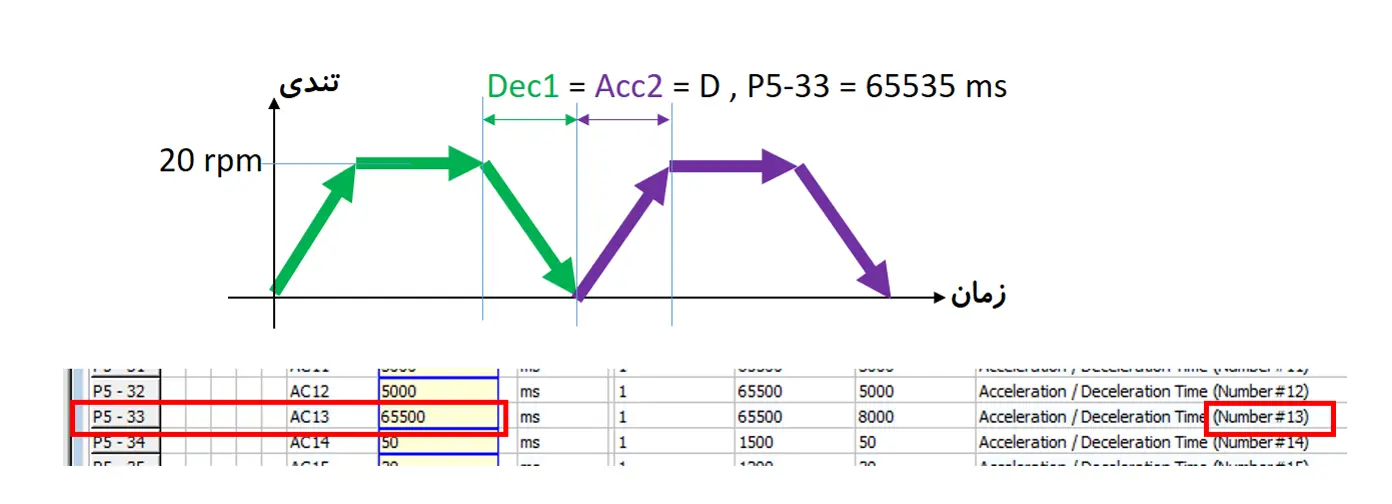
- تندی هر دو روند کم باشد: 20 rpm
- زمان تندی کاهی روند یکم و زمان تندی افزایی روند دوم رو بیشترین اندازه میذارم، P5-33 رو میذارم 65500 که بیشترین اندازه شدنی برای زمان های تغییر تندی هست و این اندازه رو برای تندی کاهی دستور یکم و تندی افزایی دوم میگزینم.
چرا؟ چون میخوام بهتون نشون بدم که اگر بیت همپوشانی رو یک کنید، موتور دیگه بین دو دستور نمی ایسته، خوب شما باید ببینید که اگر یک نکنیم می ایسته، و اگر تندی بالا باشه و زمان های تغییر تندی پایین باشه، چون همه چیز خیلی سریع رخ میده، نمیتونید با چشمتون ، صفر شدن تندی رو ببینید.
برای آغاز آزمایش،
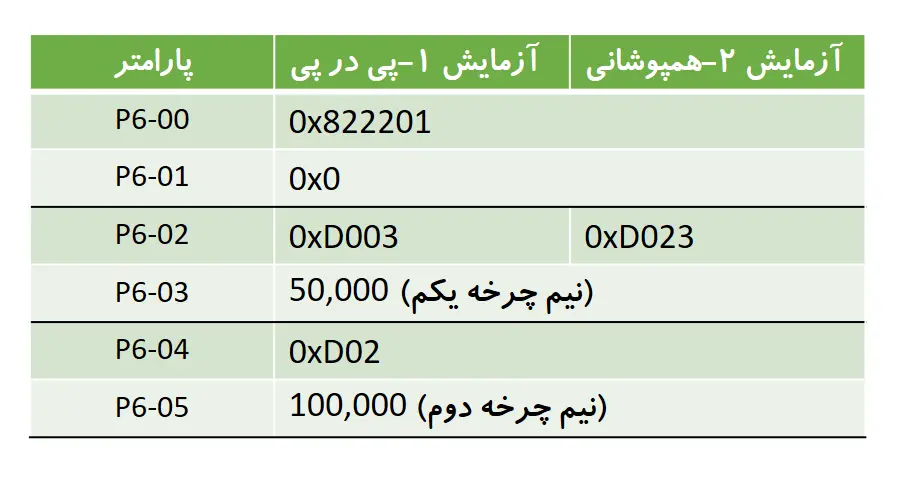
- تنظیم پارامتر ها را مانند چیزی که در جدول زیر نوشتم انجام دهید.
- پایه های POS را خاموش کنید تا روند صفر گزینش شود.
- پایه ی SON را روشن کنید.
- با لبه روشن شو پایه ی CTRG ، روند خانه را فراخوانی کنید.
پس از خانه با 2 ثانیه دیرکرد، روند 1 فراخوانی میشود و موتور به مختصات 50,000 میرود، پس از روند 1، روند 2 آغاز میشود و موتور نیم چرخش دیگر هم به پیش میره تا به مختصات 100,000 برسه.
آزمایش 1 بدون همپوشانی: موتور بین روند 1 و 2 ، لحظه ای می ایستد.
آزمایش 2 با همپوشانی : موتور بین روند 1 و 2 ، نمی ایستد.
آزمایش رفتار بازداری دستورهای جایگاه در سروو موتور دلتا
میخواهیم ببینید که هنگامی که دستورهای مطلق و افزایشی و نسبی (absolute , incremental, relative) از یک دستور مطلق بازداری کنند، چه رفتاری از خود نشان میدهند. سه آزمایش داریم که در هر کدام سه روند انجام میشود.
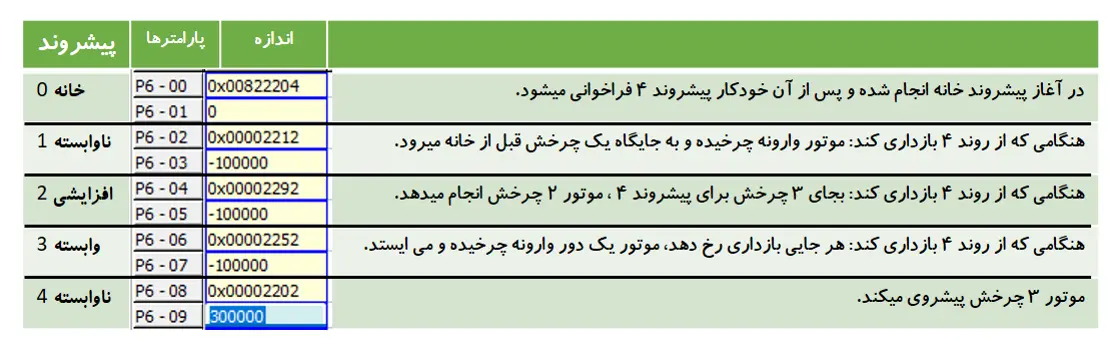
- روند شماره 0 : دستور خانه، پس از آن خودکار روند شماره 4 فراخوانی میشود.
- روند شماره 4 : دستور رفتن به جایگاه مطلق.
- روند شماره 1 یا 2 یا 3 : در سه آزمایش ، سه دستور مطلق و افزایشی و نسبی، از دستور مطلق بازداری میکنند.
در این سه آزمایش، روش فراخوانی روند سوم (که روند شماره 1 یا 2 یا 3 است) یکسان است. هر سه با بازداری بیرونی با بکارگیری پایه های CTRG و POS0 و POS1 فراخوانی میگردند. هدف این آزمایش، یادگیری روش های گوناگون فراخوانی نیست، یادگیری رفتار روند های گوناگون در بازداری است.
گام به گام آزمایش
- تنظیماتی که در جدول زیر نوشتم رو در پارامتر ها بنویسید.
- پایه های POS0 و POS1 را خاموش میکنیم تا روند صفر گزینش شود.
- پایه SON را روشن کنید.
- با لبه ی روشن شو پایه ی CTRG ، روند صفر را آغاز میکنیم.
پس از روند صفر ، روند چهار، خودکار آغاز خواهد شد. در هنگام انجام روند چهار، باید با بازداری بیرونی یکی از روند های 1 و 2 یا 3 را گزینش کنیم تا از انجام روند 4 بازداری کرده و خودش آغاز گردد.
- با پایه های POS0 , POS1 شماره ی 1 یا 2 یا 3 را گزینش کنید.
- با لبه ی روشن شو پایه ی CTRG ، روند دلخواهمان را آغاز مینماییم تا از روند 4 بازداری کند.