در این نوشته همه چیز در مورد روند گزینش جایگاه خانه ( homing) رو یاد میگیرد.

آشنایی با حسگر های جایگاه خانه در سروو موتور دلتا
با بکارگیری چهار حسگر ، جایگاه خانه رو گزینش میکنیم . سه تا پایه ی ورودی دیجیتال برای بستن این سه حسگر به سروو درایور هست .
- پایه ی حسگر حد مثبت یا positive limit – PL
- پایه ی حسگر حد منفی یا NL- negative limit
- پایه ی حسگر ORGP
یک حسگر دیگه هم در انکودر هست که هر یک دور یک پالس میده و پایه ی ورودی برای اون نداریم چون داخلی وصل هست.
4. پالس Z که از انکودر میاید.
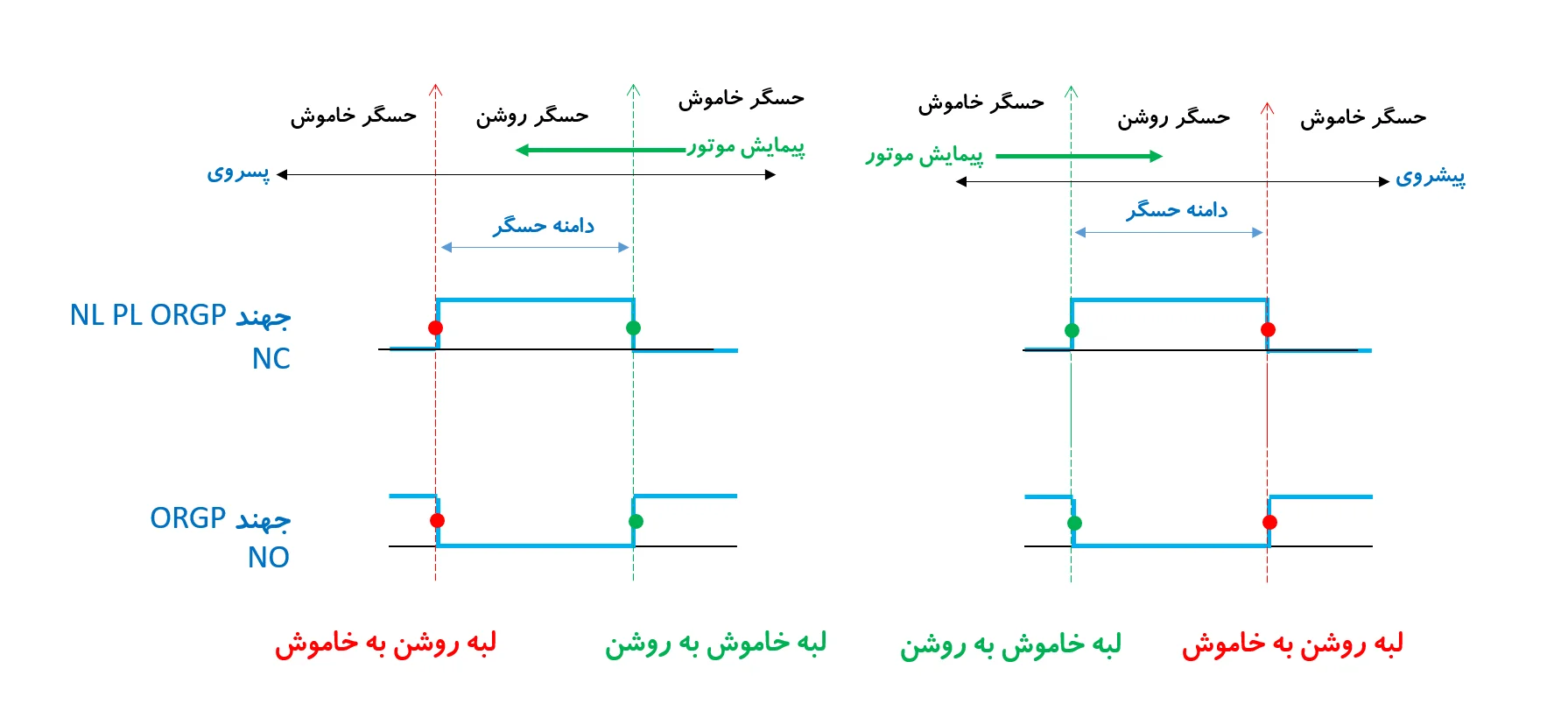
پایه های حسگر های حد مثبت و منفی باید معمولی-بسته باشند و هنگامی که حسگر چیزی حس نکرده ( حالت معمولی ) باید خروجی حسگر همچون یک سوئیج بسته باشند. ولی پایه ی حسگر ORGP میتواند هر یک از دو گونه باشد.
لبه ی روشن به خاموش و خاموش به روشن
- لبه ی خاموش به روشن: جایی که موتور به حسگر رسیده و درون دامنه ی حسگر رفته. آغاز دامنه ی حسگر .
- لبه ی روشن به خاموش: لبه ی دیگری . پایان دامنه حسگر .
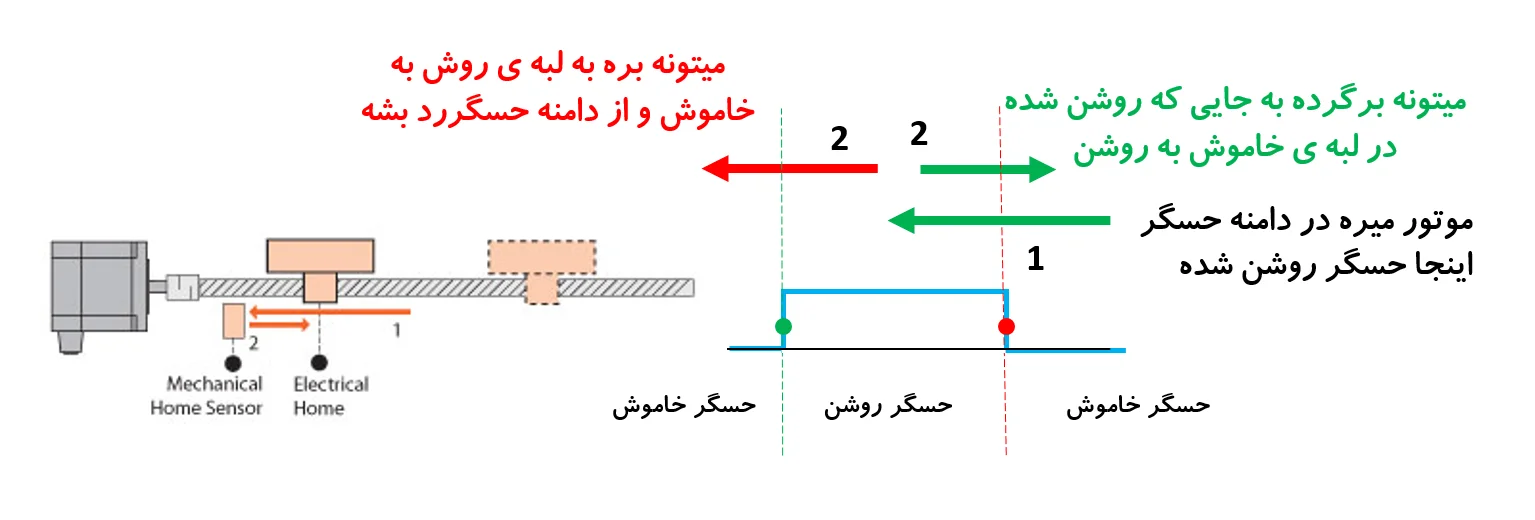
هنگامی که موتور به درون دامنه حسگر رفت، دو راه داره:
- برگرده به لبه خاموش به روشن : وارونه بگرده و برگرده به جایی که حسگر روشن شده.
- بره به لبه روشن به خاموش : در همین سو بره تا از حسگر رد بشه.
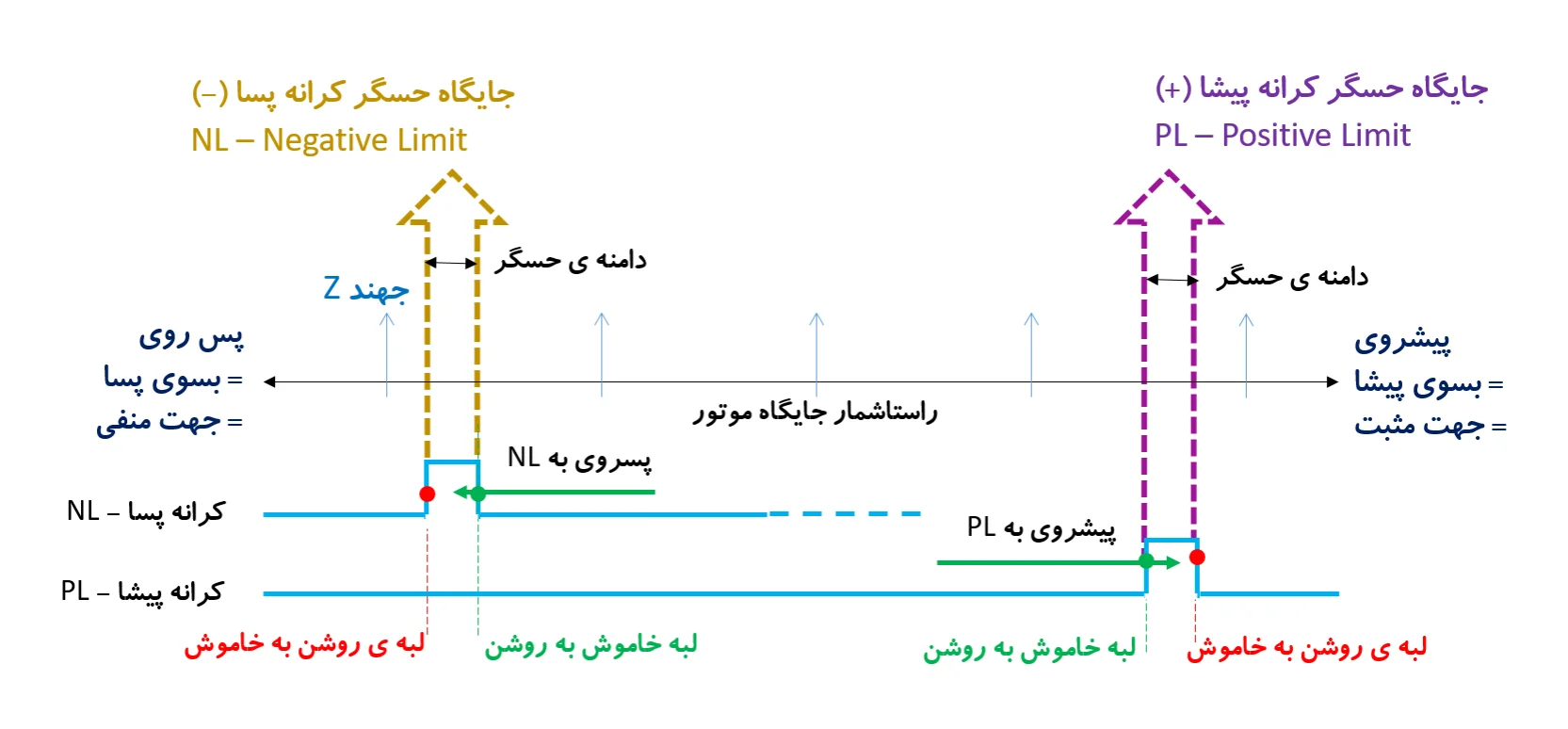
پندارید که جایگاه موتور با یک نقطه روی محور بیان میشود .
- اگر اندازه ی جایگاه موتور افزایش یابد ، موتور پیشروی کرده .
- اگر اندازه ی جایگاه موتور کاهش یابد ، موتور پسروی کرده .
موتور تنها میتواند با پیشروی به حسگر حد مثبت و تنها با پسروی به حسگر حد منفی برسد.
آشنایی با روند گزینش جایگاه خانه در سروو موتور دلتا
در این بخش میخوام بهتون بگم که مبدا مختصات و جایگاه خانه هر کدوم چی هستند .
جایگاه موتور، با یک فاصله از مبدا گزارش میشود. و میتوان آنرا روی یک محور نشان داد. یکای فاصله ، PUU است.
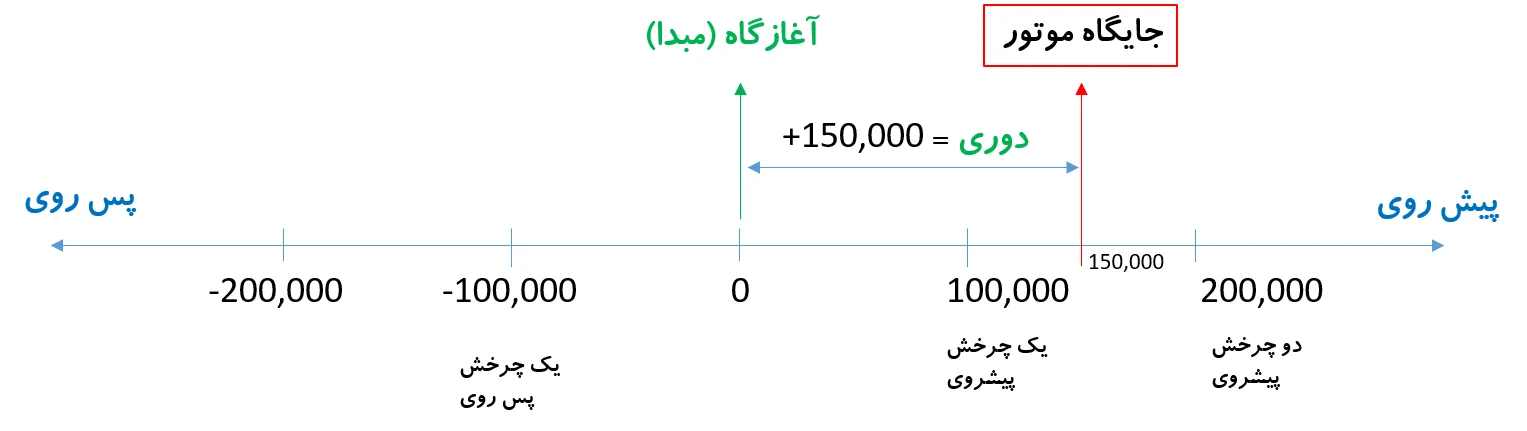
روند گزینش خانه پیچیده است و نمیخواهم اکنون به ریزه کاری های آن بپردازم، تنها همین که در پایان این روند، موتور اندکی پس از خانه می ایستد.
خانه جایی است که تندی کاهی ( کاهش سرعت = شتاب منفی ) آغاز میشود، تا تندی موتور کاهش یابد و به صفر0 برسد. این همان جایی است که لبه روی یکی از پایه های PL، NL ، ORGP یا پالس Z روی داده است. خانه، جایگاه موتور همزمان با یک رویداد فیزیکی است.

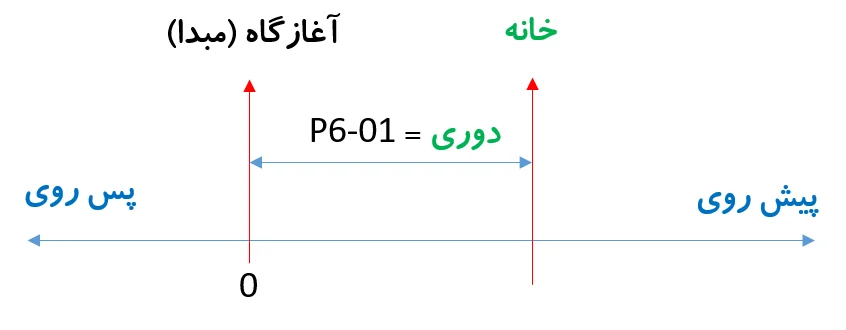
ولی مبدا ، جایی است که وابسته به خانه ، مشخص میشود، اگر P6-01=0 باشد، جایگاه خانه ، مبدا هم هست، و اگر نه، با P6-01 فاصله ی مبدا از خانه را اندازه میدهیم.
روند PR0 یا homing یا گزینش خانه ، برای این هست که جای مبدا دانسته بشه ، هدف homing بردن موتور به جایگاه خانه نیست و بعد از روند homing اصلا موتور در جایگاه مشخصی نمی ایستد. روند homing برای مشخص کردن مختصات است نه جایگاه.
هر کدام از روند های 0 تا 63 دو پارامتر 32 بیتی برای تنظیم دارند که پارامتر ویژگی دهی و داده هستند.
ولی روند صفر یا PR0 یا روند گزینش جایگاه خانه ، افزون بر پارامتر P6-00 برای ویژگی دهی و پارامتر P6-01 برای داده ، سه پارامتر دیگر هم دارد.

پارامتر P6-00 در سروو موتور دلتا : ویژگی دهی روند گزینش جایگاه خانه
ویژگی های پیمایش به خانه که در این پارامتر نوشته میشود چیست؟
– زمان تندی افزایی و تندی کاهی ( 0~F ) : زمانهای افزایش و کاهش تندی.
– روند بعدی ( 00 ~ 1F ) : اگر غیر صفر باشد، پس از پایان دستور خانه و سپری شدن زمان دیرکرد، روند با شماره نوشته شده در “روند بعدی”
، آغاز میگردد.
– زمان دیرکرد ( 0~F ) : پس از پایان روند خانه، به اندازه ی زمان دیرکرد سروو موتور بیکار است و سپس روند پسین آغاز میگردد.

نمونه اندازه دهی پارامتر ویژگی دهی روند گزینش جایگاه خانه در سروو درایور دلتا
یادتون باشه که زمان های تندی افزایی و تندی کاهی ، از بین 16 زمان از پیش نوشته شده در پارامتر های P5-20 ~ P5-35 گزینش میشن. همینجور زمان دیرکرد از بین 16 زمان از پیش نوشته شده در P5-40 ~ P5-55 گزینش میشه.
- چهاربیتی های ACC = DEC1 = DEC2 = 2 پس:
زمان تندی افزایی = زمان تندی کاهی یک = زمان تندی کاهی دو = P5-22 = 500 ms، به این معنی که 500 میلی ثانیه زمان لازمه تا تندی افزایش یا کاهش پیدا کنه.
- چهاربیتی DLY = 8 پس:
زمان دیرکرد = P5-48 = 2000 ms و دو ثانیه پس از پایان روند خانه، زمان بیکاری داریم، تا آغاز روند پسین.
- هشت بیتی PATH = 03 پس:
روند سه (PR3) پس از روند خانه و سپری شدن زمان دیرکرد، آغاز خواهد شد.

پارامترهای تندی گذاری روند خانه در سروو درایور دلتا
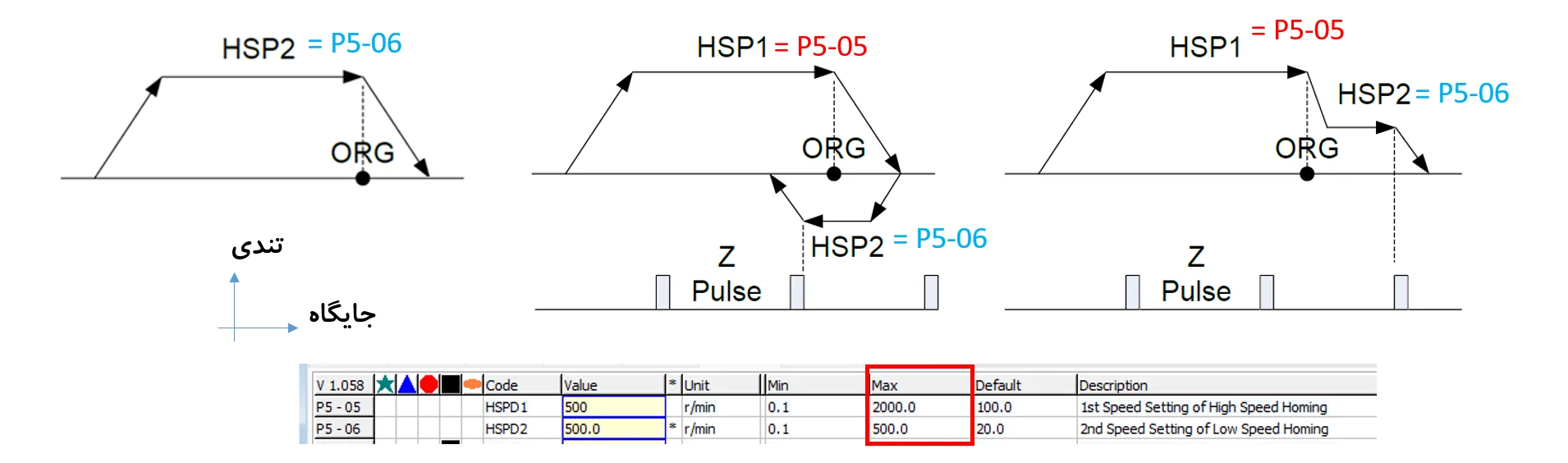
دو پارامتر برای تندی گذاری ( مشخص کردن تندی) روند گزینش جایگاه خانه داریم.
- تندی یکم یا HSPD1 در پارامتر P5-05 با بیشینه 2000 r/min.
- تندی دوم یا HSPD2 در پارامتر P5-06 با بیشینه 500 r/min.
چرا دو تندی دارد؟ چون گاهی روند گزینش خانه اینجوری است که :
- با تندی یکم میرد تا لبه از PL یا NL یا ORGP دریافت کند.
- هنگامی که لبه ی یکم را دریافت کرد، با تندی دوم میرود تا لبه Z را دیافت کند.
نمودار های زیر از خود دفترچه ی راهنما برداشت شده، و تندی بر جایگاه است، که نمودارش خطی نمیشود، ولی خطی کشیده که نادرست است. نمودار هایی که خودم کشیدم، همه تندی بر زمان هستند، که اون ها خطی هستند.
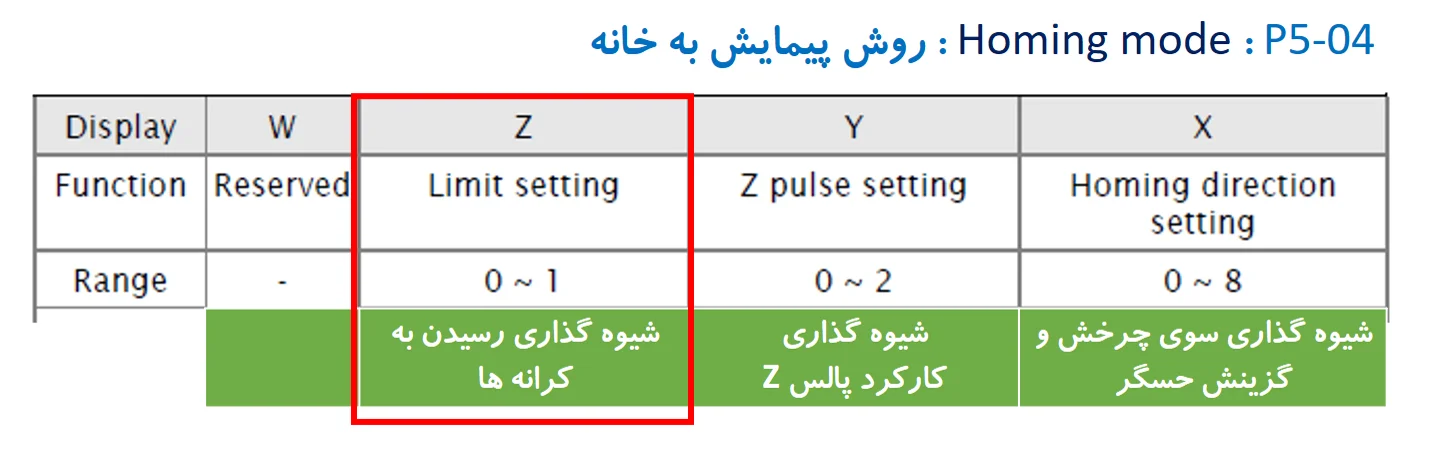
پارامتر P5-04 : تنظیم روش پیمایش به خانه در سروو موتور دلتا
تندی ها و زمان های تندی افزایی و تندی کاهی در پارامتر های P6-00 و P5-05 و P5-06 اندازه دهی شد. اکنون در پارامتر P5-04 باید روش پیمایش را تنظیم کنیم.

روش پیمایش چیست؟
موتور میچرخه تا لبه دریافت کنه، روش اینه که کدوم وری بچرخه تا چه لبه ای دریافت کنه؟ در پیمایش بسوی خانه، یک یا دو یا سه لبه میتونه بکارگرفته بشه که میتونه پیمایشی بین دو تا چهار گام بسازه.
روش های پیمایش:
- تنها بکارگیری پالس Z (یک لبه، دو گام)
- حسگر NL یا PL تنها (دو لبه ، سه گام)
- حسگر ORGP تنها (دو لبه ، سه گام)
- حسگر PL یا NL با پالس Z (دو لبه ، سه گام)
- حسگر ORGP با Z (سه لبه ، چهارگام )
اینکه روش پیمایش چی باشه، در یکان X و دهگان Y پارامتر P5-04 تنظیم میشه. پس از اینکه با یکان و دهگان آشنا شدید، این 5 روش پیمایش رو بررسی میکنیم.
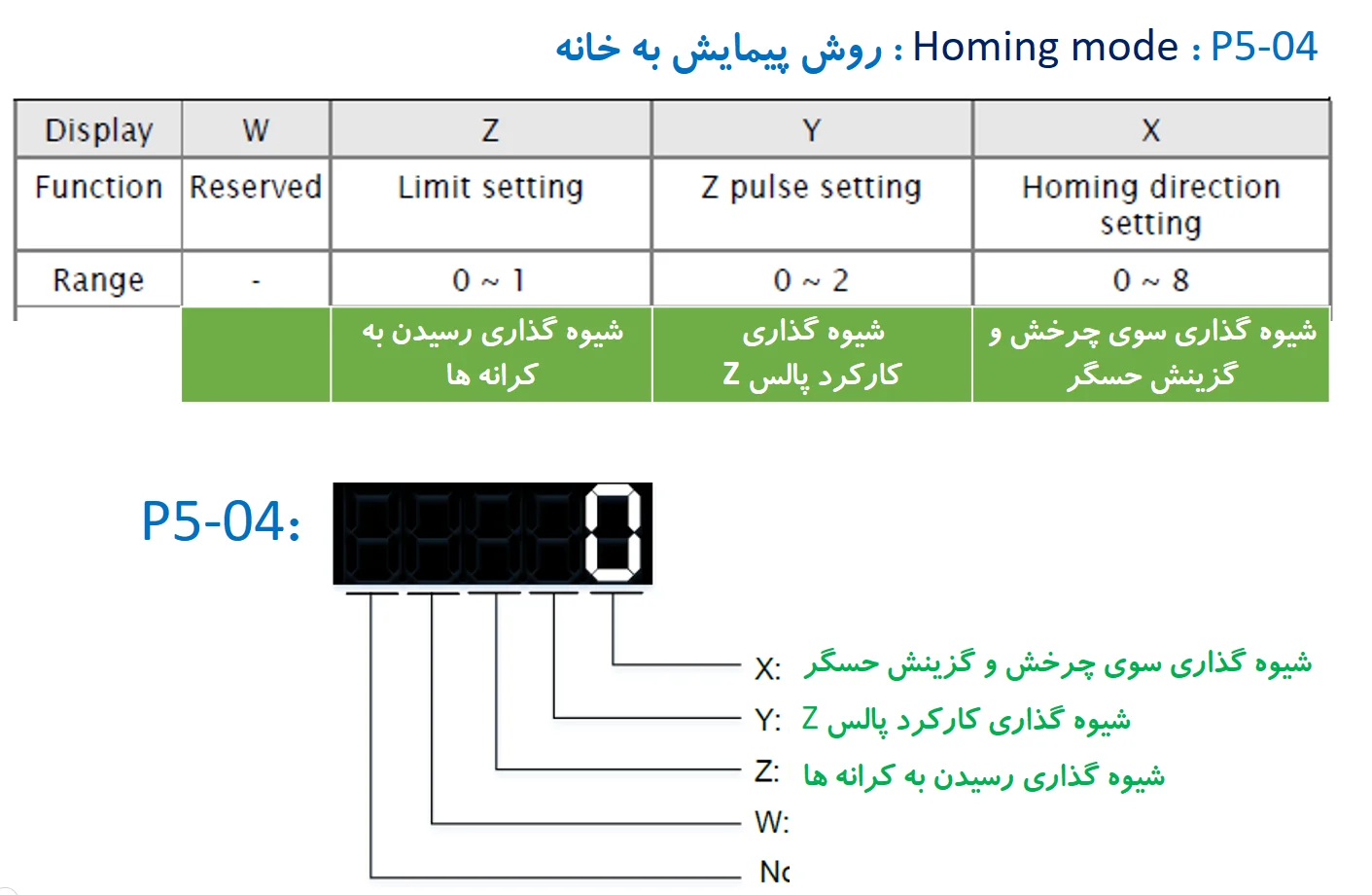
تنظیم سوی چرخش و گزینش حسگر در یکان (X) پارامتر P5-04 در سروو درایور دلتا
چیزهایی که در یکان X پارامتر P5-04 تنظیم میشه:
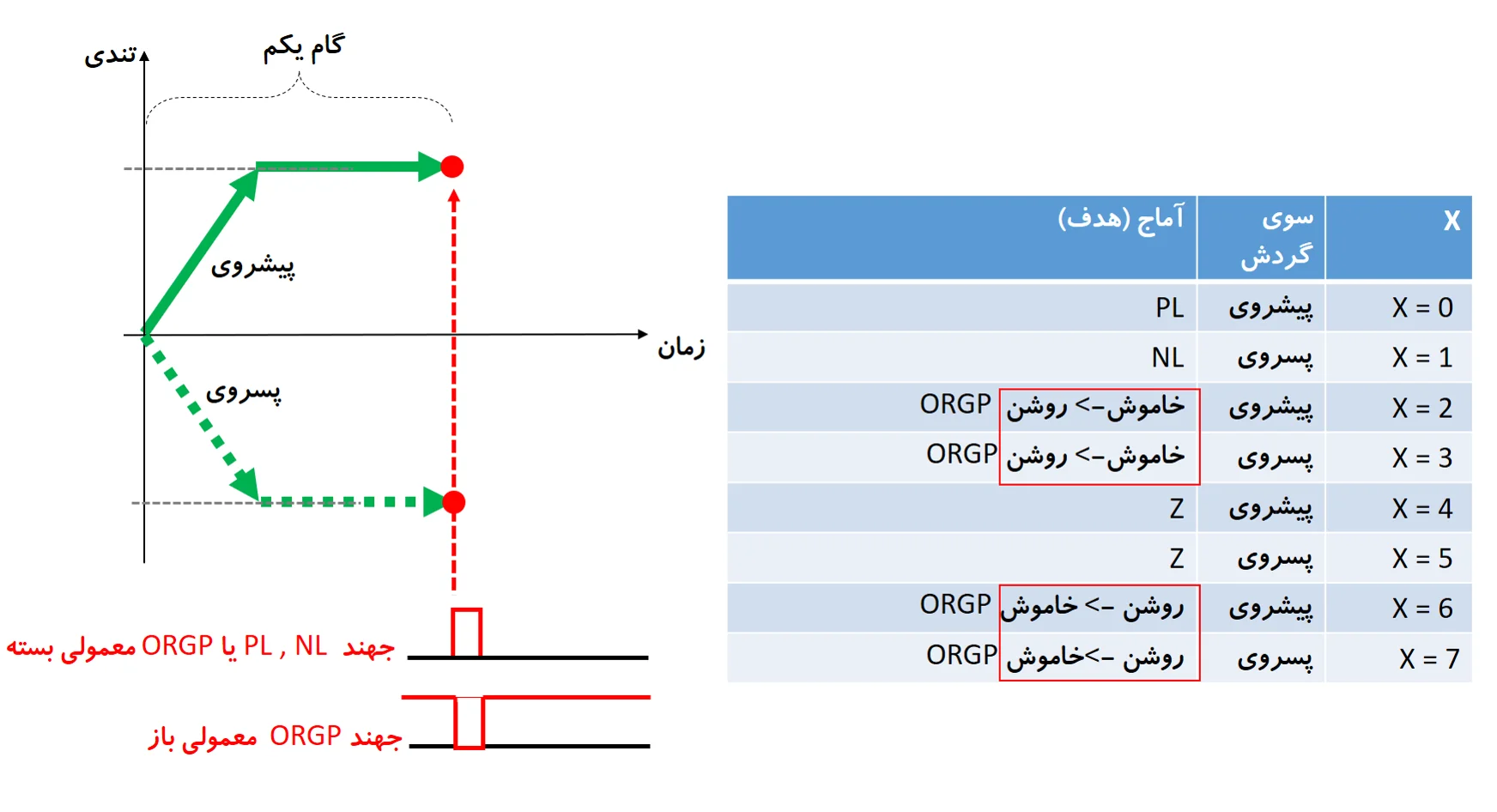
- سوی نخستین چرخش در گام یکم : در آغاز پیمایش بسوی خانه، موتور در چه سویی بچرخد.
- لبه ی هدف برای گام یکم: در گام یکم، موتور تا دریافت لبه از کدام پایه ( NL , PL , ORGP ) بچرخد.
- برای حسگر ORGP ، سوی چرخش برای بیرون رفتن از دامنه ی حسگر در گام دوم هم در X گزینش میشه، اون خاموش و روشن که برای ORGP نوشته برای گام دوم هست.
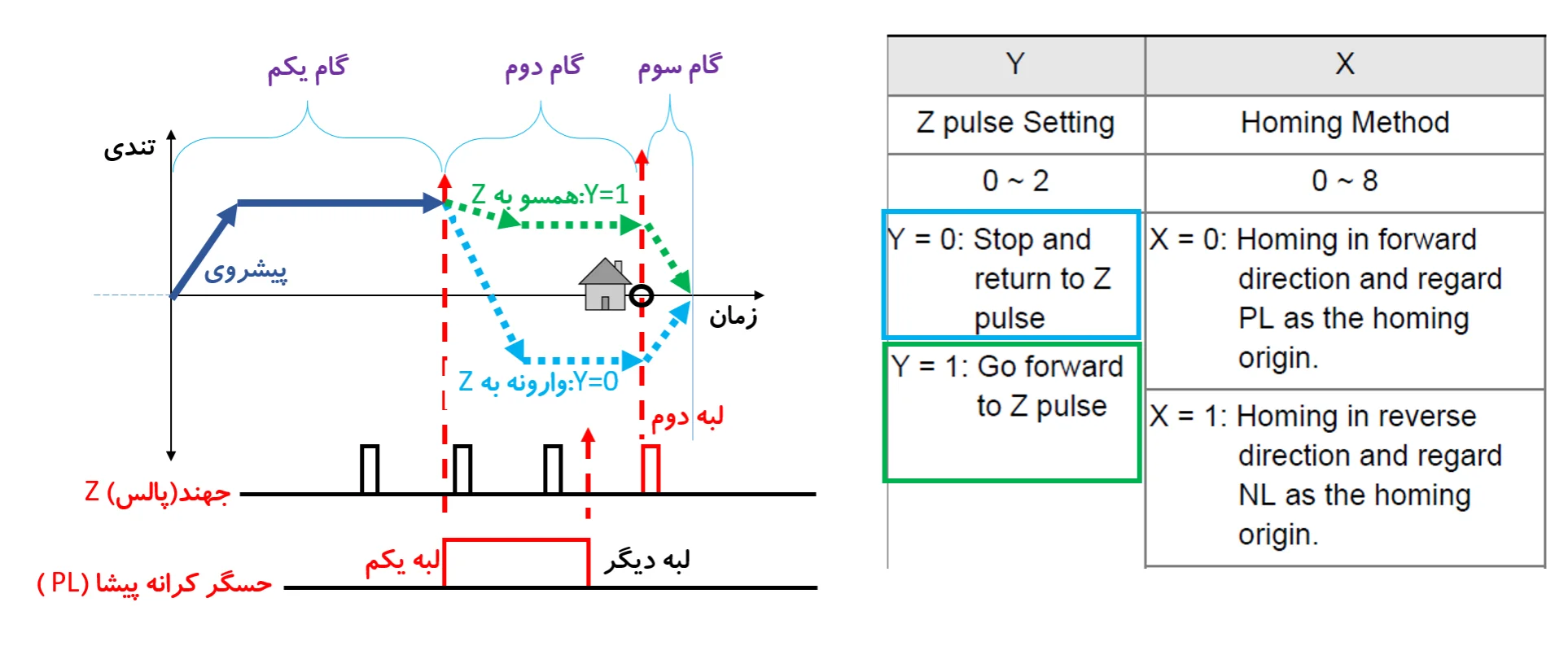
تنظیم نقش پالس Z در دهگان (Y) پارامتر P5-04 در سروو درایور دلتا
دهگان در پارامتر P5-04 بیانگر نقش پالس Z است :
- اگر Y=2 : پالس Z نادیده گرفته شده و بکار گرفته نمیشه.
- اگر Y=0 : لبه ی پایانی ( لبه دوم یا سوم) پالس Z است و در سوی وارونه به Z میرود.
- اگر Y=1 : لبه ی پایانی ( لبه دوم یا سوم) پالس Z است و در همان سو به Z میرود.
وارونه یا همسو چرخیدن در یک گام، نسبت به سوی چرخش در گام قبلی اش گفته میشود.
تنظیم رفتار در صورت رسیدن به حد مثبت و منفی در هنگام رفتن به خانه در سروو موتور دلتا
تا اینجا در پارامتر P5-04 ، یکان و دهگان را بررسی کردیم ، اکنون میرسیم به صدگان، با صدگان تنظیم میکنیم که اگر هنگام رفتن بسوی حسگر های ORGP یا جهند Z ، موتور به حسگر های حد مثبت یا منفی رسید چه بشود. این رویدادی است که شاید روی بدهد و یا روی ندهد.
صدگان Z=0 : موتور مانند همیشه، هنگامی که لبه از حسگر های حد دریافت کرد، پیام هشدار میدهد.
صدگان Z=1 : موتور پس از رسیدن به حسگرهای حد می ایستد و سپس در سوی وارونه میگردد.
روش های پیمایش به خانه در سروو موتور دلتا
روش های پیمایش که در پارامتر P5-04 تنظیم میشن ، اینها هستند.
- تنها بکارگیری پالس Z (یک لبه، دو گام)
- حسگر NL یا PL تنها (دو لبه ، سه گام)
- حسگر ORGP تنها (دو لبه ، سه گام)
- حسگر PL یا NL با پالس Z (دو لبه ، سه گام)
- حسگر ORGP با Z (سه لبه ، چهارگام )
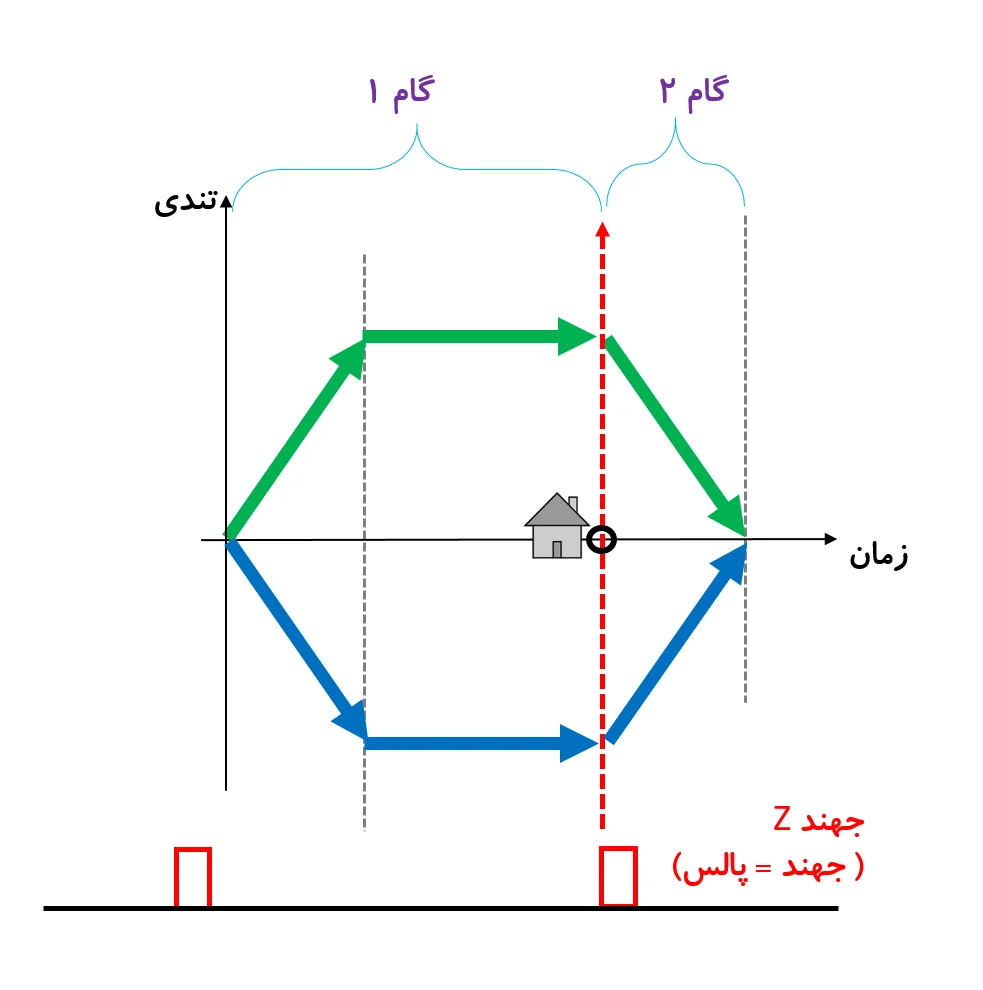
1- پیمایش به خانه با بکارگیری پالس Z تنها در سروو درایور دلتا
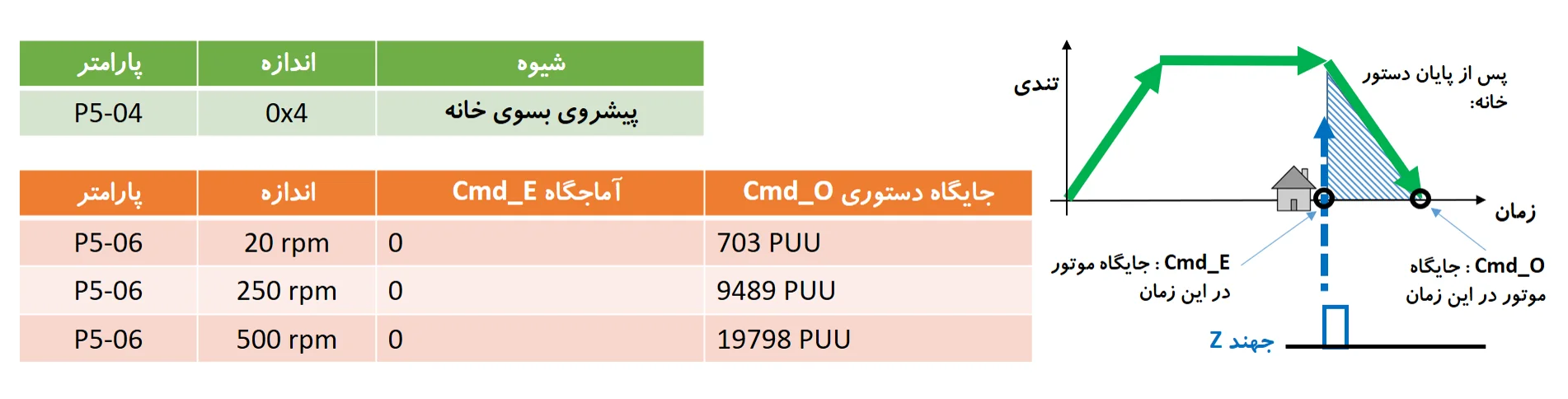
در بررسی پارامتر P5-04، نخست روش ساده پیمایش به خانه را بررسی میکنیم که در آن P5-04 = 0x4 or 0x5 است.
- هنگامی که X=4 : موتور پیشروی (حرکت به مثبت) میکند تا پالس Z را دریافت کند.
- هنگامی که X=5 : موتور پسروی (حرکت به منفی) میکند تا پالس Z را دریافت کند.
این پیمایش دو گام دارد و یک لبه. و با لبه (که پالس Z است) از گام یکم به دوم میرود. گامها:
- موتور در زمان تندی افزایی به تندی HSP2 میرسد ، با تندی HSP2 میچرخد تا هنگامی که لبه ی پالس Z روی دهد.
- پس از لبه ی پالس Z ، در زمان تندی کاهی 2 ، تندی از HSP2 به صفر میرسد.
خانه، جایگاهی است که لبه ی پالس Z روی داده.
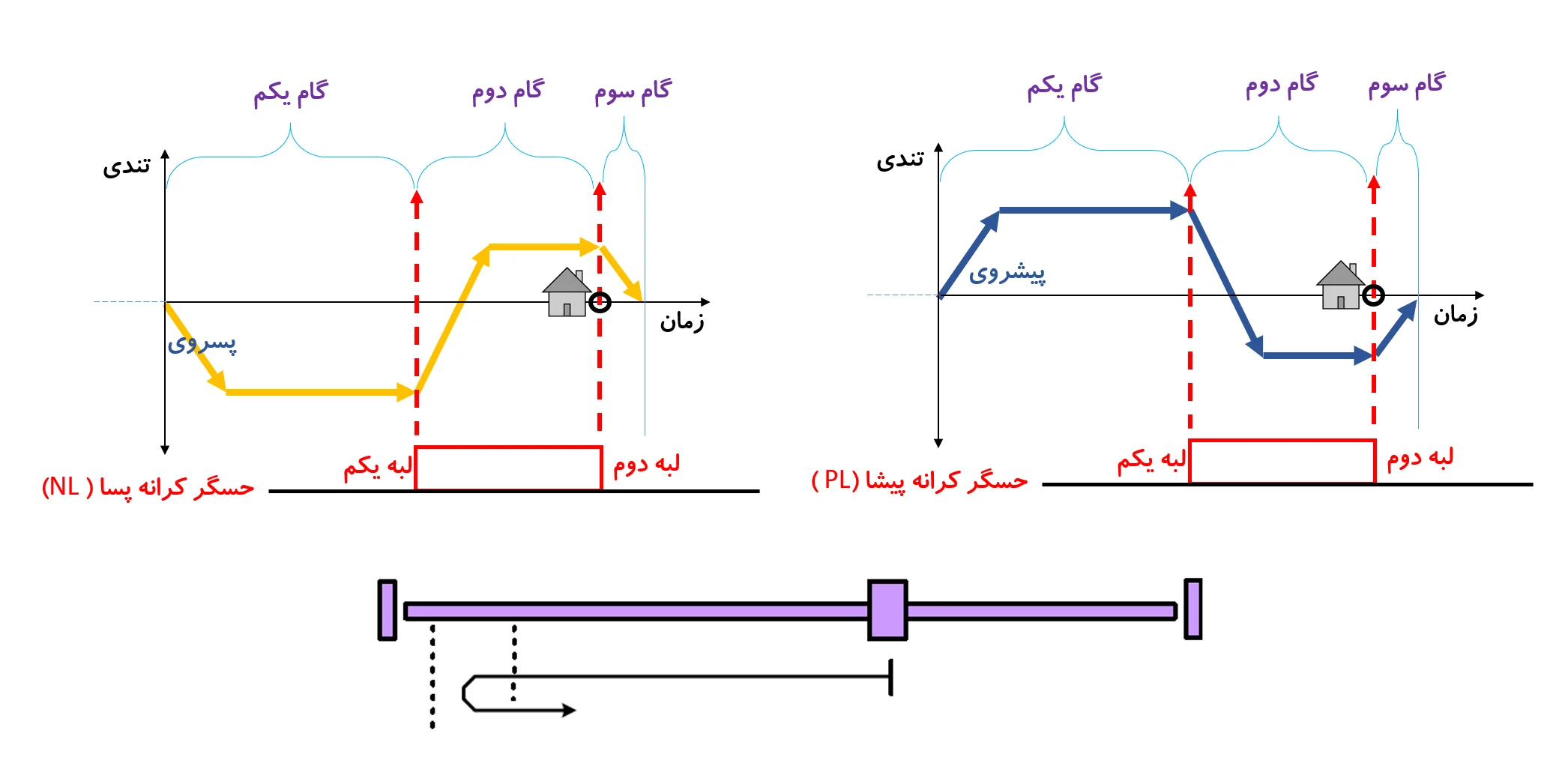
2- پیمایش به خانه با حسگر NL یا PL تنها (دو لبه ، سه گام) در سروو موتور دلتا
- یکان : X=1 برای پیشروی به PL .
- یکان X=2 برای پسروی به NL.
- دهگان : Y=2 برای بیکار بودن پالس Z.
گامها:
- موتور پیشروی (بسوی PL ) یا پسروی (بسوی NL) میکند، تا به تندی HSP1 برسد و میچرخد تا لبه ی یکم را دریافت کند.
- پس از دریافت لبه ی یکم، موتور درون دامنه ی حسگر شده، اکنون تندی خود را کم میکند تا بایستد و سپس در سوی وارونه میچرخد تا تندی اش به HSP2 برسد و میخواهد از همان جایی که درون دامنه ی حسگر شده، بیرون برود. موتور تا دریافت لبه ی دوم از حسگر با تندی HSP2 میچرخد.
- هنگام دریافت لبه ی دوم، موتور به همان جایی بازگشته که از آنجا به درون دامنه حسگر رفته، همان جایی که لبه ی دوم روی میدهد، همانجا خانه است. و از ایجاست که کاهش تندی آغاز میگردد و موتور اندکی پس از خانه می ایستد.
لبه ی یکم و لبه ی دوم، هر دو لبه خاموش به روشن (OFF -> ON) حسگر های حد مثبت یا منفی هستند.
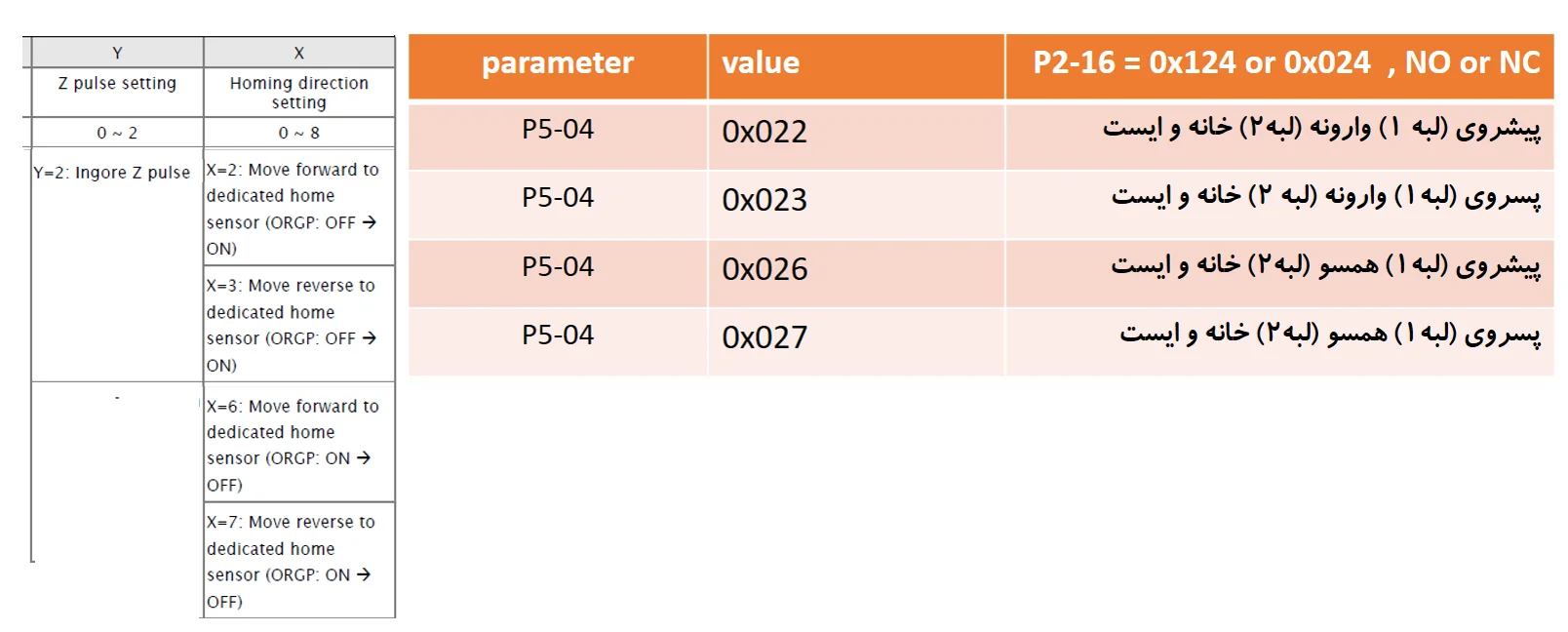
3- پیمایش به خانه با حسگر ORGP تنها (دو لبه ، سه گام) در سروو موتور دلتا
گام های یکم با تندی HSPD1 و گام های دوم با تندی HSPD2 است.
- یکان : X=2 : گام اول پیشروی و گام دوم پسروی تا از همان سویی که درون دامنه حسگر شده ، از همان سو هم بیرون رود .
- یکان : X=6 : گام اول پیشروی و گام دوم هم پیشروی تا از یک سو درون دامنه حسگر شود و از سوی دیگر بیرون برود.
- یکان : X=3 : گام اول پسروی و گام دوم پیشروی.
- یکان : X=7 : گام اول پسروی و گام دوم هم پسروی.
- دهگان : Y=2 برای بیکار بودن پالس Z.
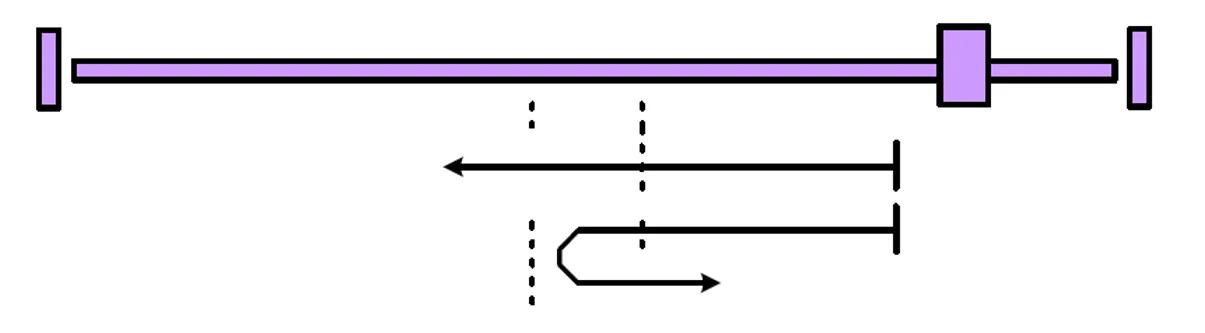
برای پیمایش به خانه با حسگر های NL و PL ، سوی گردش در گام دوم همیشه وارونه گام یکم بود. ولی برای حسگر ORGP میتوانیم تنظیم کنیم که پس از لبه ی یکم،در گام دوم موتور وارونه یا همسوی گام یکم بگرده، تا هنگامی که لبه ی دوم را دریافت کند. پس از لبه ی یکم، موتور درون دامنه ی حسگر شده، بیرون رفتنش دو راه داره:
- در گام دوم بره بسوی لبه خاموش به روشن (X=2,3) : گام دوم وارونه گام یکم میگرده تا برسه به همون جایی که درون دامنه حسگر شده.
- در گام دوم بره بسوی لبه ی روشن به خاموش (X=6,7) : گام دوم همسو با گام یکم میگرده. از یکسو به درون دامنه حسگر میره و از سوی دیگر بیرون میره.

4- پیمایش به خانه با حسگر PL یا NL با پالس Z (دو لبه ، سه گام) در سروو موتور دلتا
- یکان X=0 : گام یکم پیشروی تا هنگامی که لبه ی یکم از PL دریافت گردد.
- یکان X=1 : گام یکم پسروی تا هنگامی که لبه ی یکم از NL دریافت گردد.
- دهگان Y=0 : گام پایانی ( اینجا گام دوم) وارونه ی گام یکم میرود تا هنگامی که پالس Z دریافت شود.
- دهگان Y=1 : گام پایانی (اینجا گام دوم) همسوی گام یکم میرود تا هنگامی پالس Z دریافت شود.
کارکرد لبه ی دیگر حسگر چیست؟ لبه ی دوم پیمایش که پالس Z است، تنها هنگامی دریافت میشود، که لبه ی دیگر حسگر روی داده باشد.
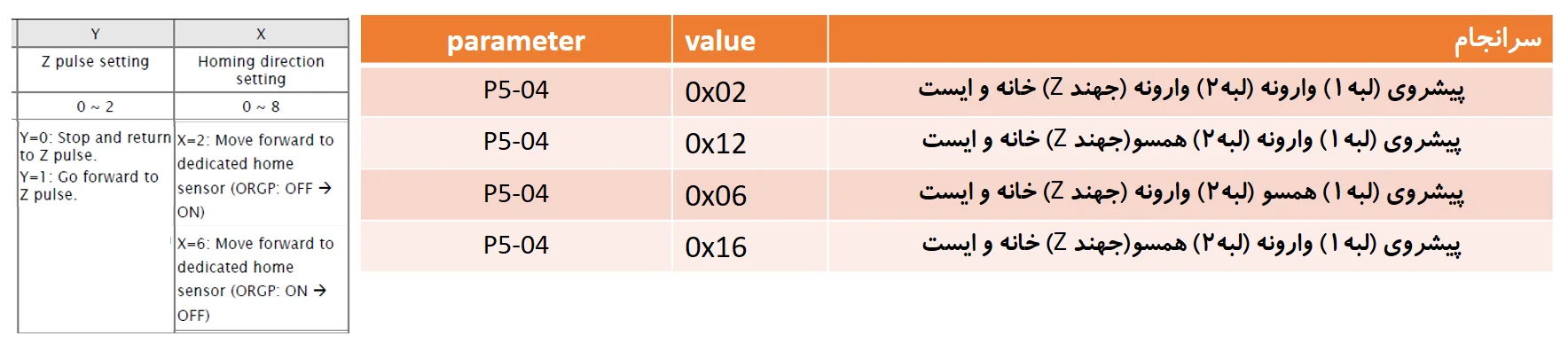
5- پیمایش به خانه با حسگر ORGP و پالس Z ( سه لبه ، چهار گام) در سروو موتور دلتا
لبه ی یکم و دوم برای حسگر ORGP و لبه ی سوم و پایانی پالس Z است، که جایگاه خانه هم هنگامی است که پالس Z روی داده .
هم از لبه ی یک به دو و هم از لبه دو به سه، میتوانیم گزینش کنیم که همسو یا وارونه بگردد.
- یکان X=2 : گام یکم پیشروی و گام دوم پسروی. از همان سویی که درون دامنه ی حسگر شده ، از همان سو هم بیرون میرود .
- یکان X=6 : گام یکم پیشروی و گام دوم پیشروی. از یکسو درون دامنه حسگر میشود و از سوی دیگر بیرون میرود .
- یکان X=3 : گام یکم پسروی و گام دوم پیشروی.
- یکان X=7 : گام یکم پسروی و گام دوم پسروی.
- دهگان Y=1 : گام پایانی ( اینجا گام سوم) همسو با گام دوم میرود تا هنگامی که پالس Z دریافت شود.
- دهگان Y=0 : گام پایانی (اینجا گام سوم) وارونه ی گام دوم میرود تا هنگامی که پالس Z دریافت شود.
یکان چهار گونه و دهگان دو گونه و با هم هشت گونه پیمایش بسوی خانه را میسازند.

نمایشگرهای جایگاه در سروو درایور دلتا
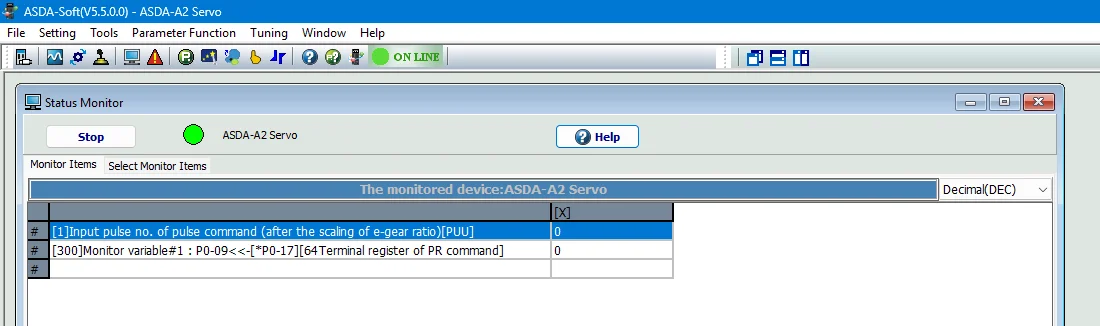
پیش از پرداختن به آزمایش ها با سروو موتور دلتا، باید با پارامتر های نمایشگر آشنا باشید. پارامترهای نمایشگر مانند پارامترهای دیگر نشانی ندارند و تنها میتوانیم آنها را بخوانیم. هر کدام از آنها یک کد دارند، در آزمایش های پیش رو، من اندازه پارامتر ها را با استفاده از نرم افزار ASDASoft میخوانم.
جایگاه هدف یا CMD_E : جایگاهی که درایور میخواهد موتور را به آنجا ببرد.
جایگاه دستوری یا Cmd_O : جایگاهی است که اکنون درایور به موتور دستور میدهد آنجا باشد.
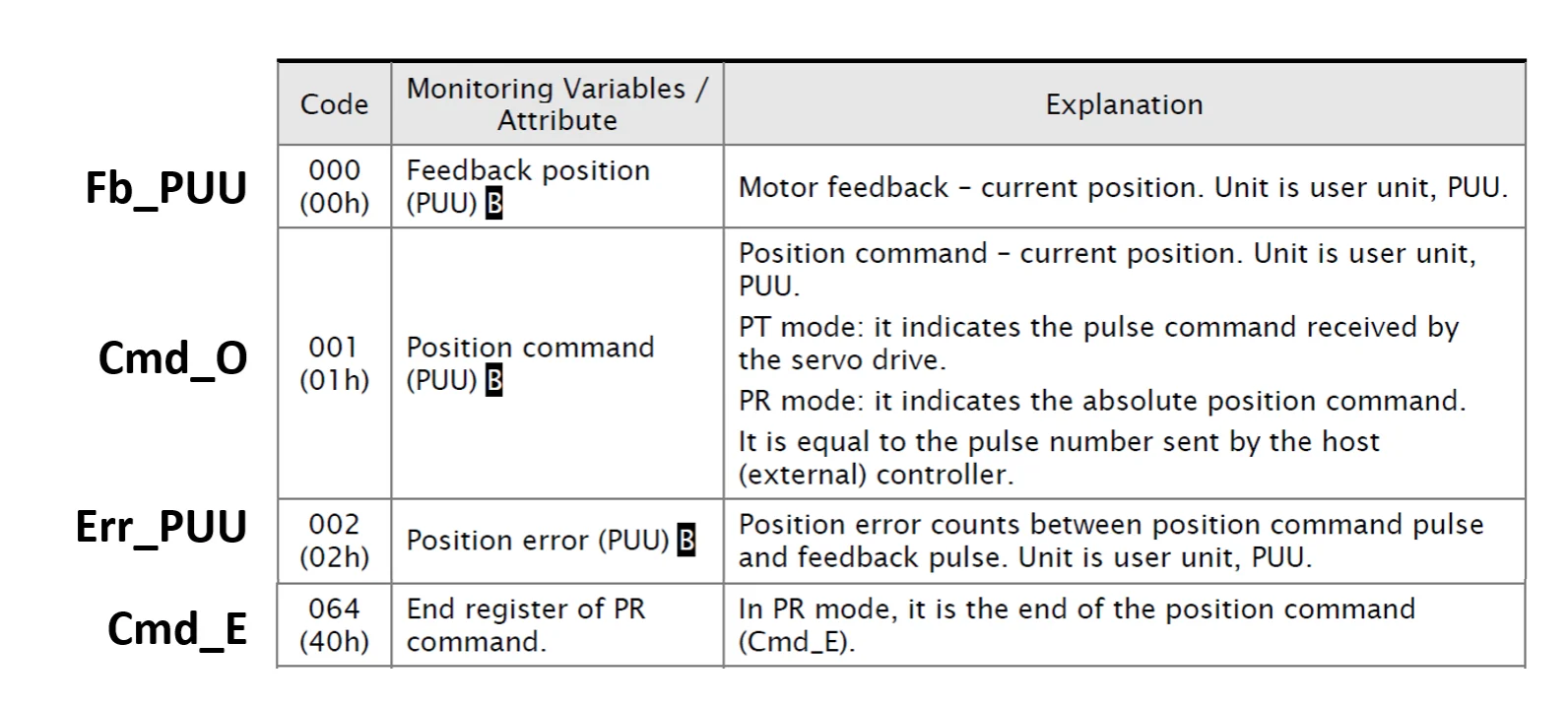
اینکه جایگاه هدف یا Cmd_E کی نو میشود و چه اندازه ای در آن نوشته میشود وابسته به گونه روند است. اکنون میخواهیم که تغییرات اندازه ی این پارامتر های نمایشی را پس از روند گزینش جایگاه خانه بررسی کنیم.
- جایگاه هدف یا Cmd_E در پایان روند خانه، نمایشگر مختصات خانه است.
- جایگاه دستوری یا Cmd_O هم بیانگر جایگاه دستوری کنونی موتور هست.
آزمایش های روند گزینش خانه برای سروو موتور دلتا
تنها راه یادگیری هرچیزی دست به کار شدن است. پس باید تنظیمات گوناگون را روی موتور آزمایش کنید و سرانجام کار را ببینید.
در آزمایش با دو گروه پارامتر سر و کار داریم:
1- پارامترهایی رو که اندازه گذاری میکنیم و اندازه اونها در زمان آزمایش دست نمیخوره.
2- پارامتری رو که دستکاری میکنیم، تا کارکرد سروو موتور رو در تنظیمات (setting) گوناگون ببینیم.
1- تنظیمات سوی چرخش سروو موتور دلتا
در پارامتر P1-01 اگر صدگان یک باشد، پیشروی ساعتگرد و اگرنه پادساعتگرد است. میخواهیم همین رو آزمایش کنیم.
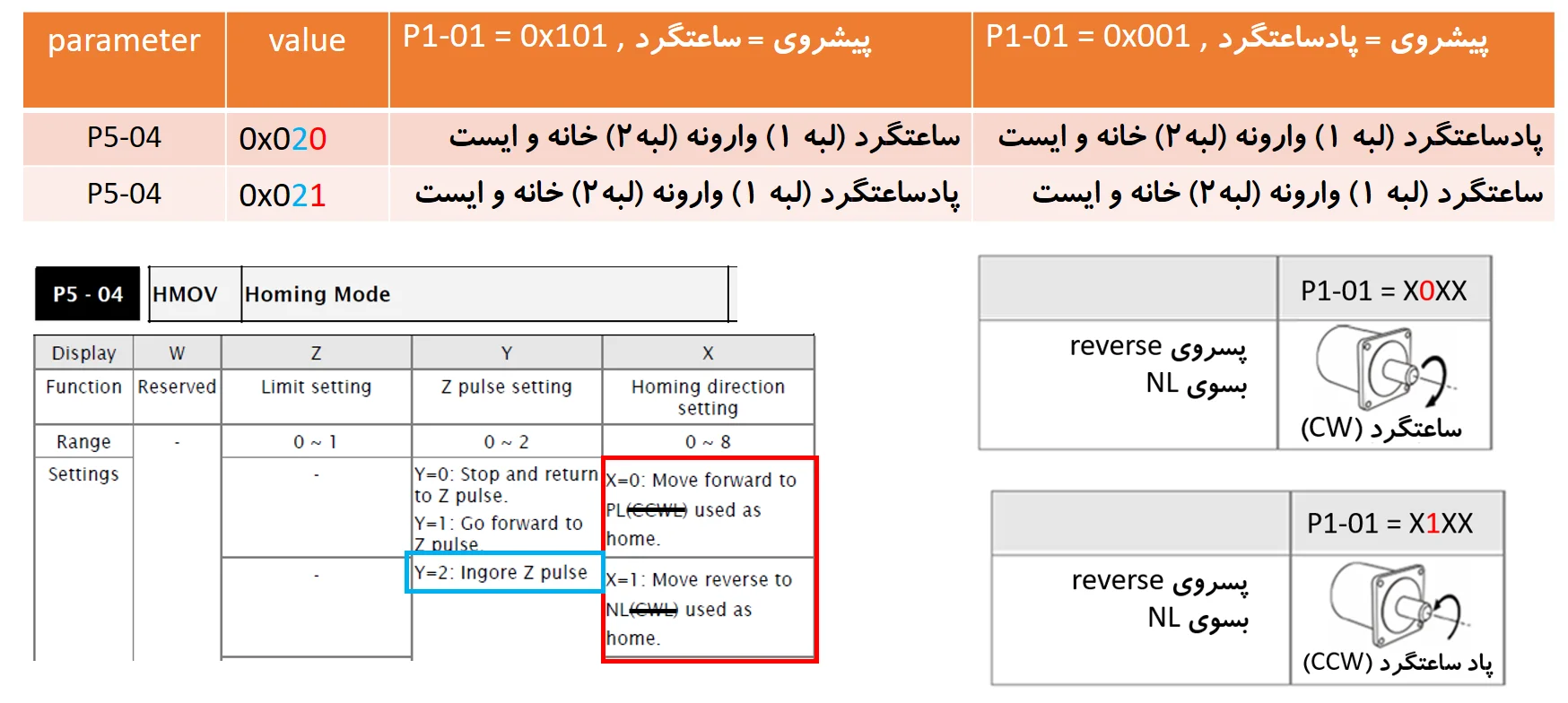
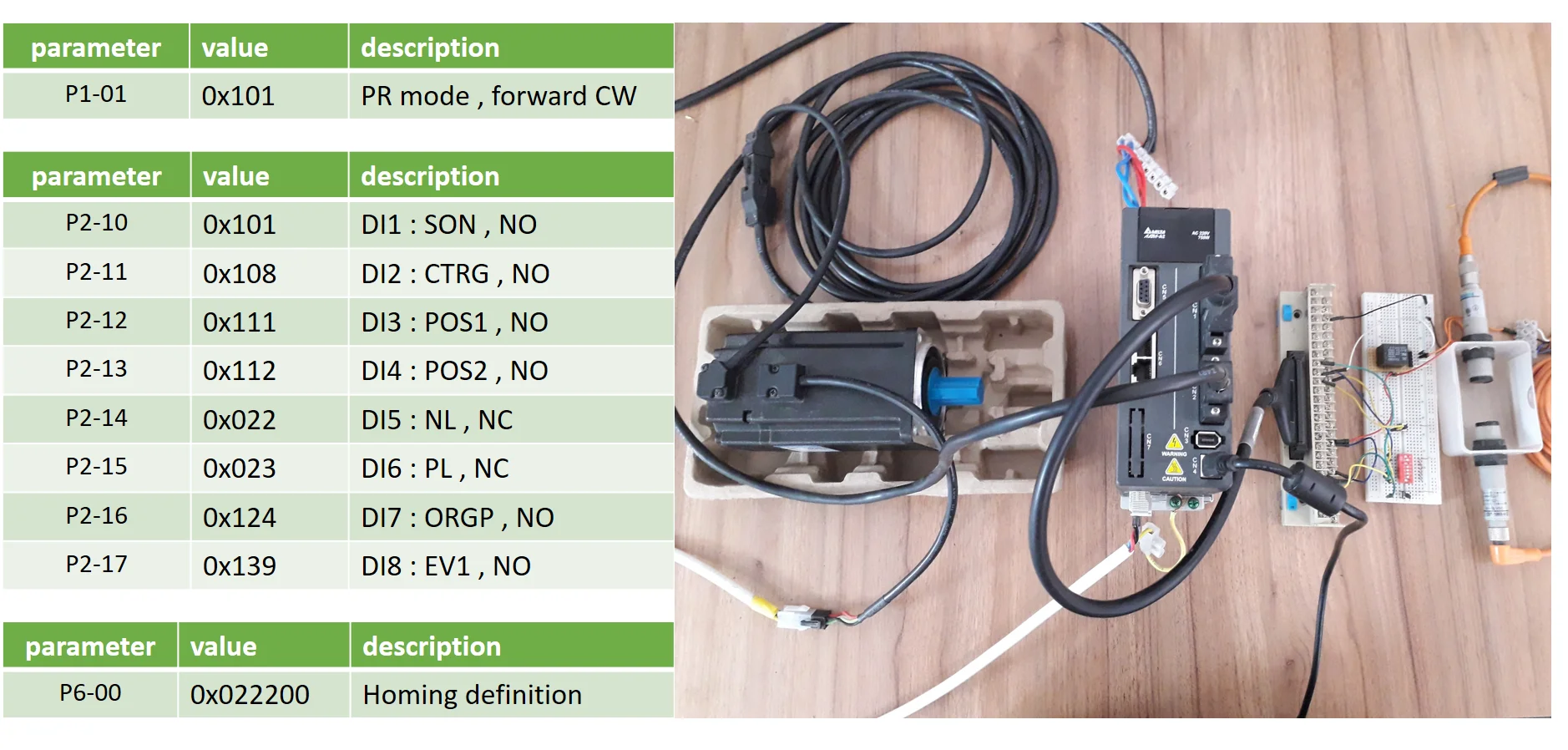
از این پس P1-01= 0x101 تا پیشروی ساعتگرد باشد.
2- گزینش خانه با حسگر ORGP و NC یا NO بودن پایه
در این آزمایش دو پارامتر P2-16 و P5-04 را همزمان دستکاری میکنیم.
در P5-04 همه ی گونه های رفتن به خانه که تنها با حسگر ORGP است را آزمایش کرده و با دستکاری P2-16 تاثیر NO یا NC بودن پایه ی حسگر را میبینیم.
با این آزمایش درمیابیم که NC و NO پایه ی حسگر ORGP ، در نتیجه ی آزمایش خود را نشان نمیدهد .
3- گزینش خانه با حسگر ORGP و پالس Z در سروو موتور دلتا
آزمایش پیمایش به خانه در چهار گام با سه لبه، پیمایش هایی که با پسروی آغاز میشوند را آزمایش نمیکنم، چون همانند پیشروی ها هستند.
4- اندازه ی تندی و اندازه ی دور شدن موتور از خانه
در پایان روند گزینش جایگاه خانه، همیشه موتور اندکی پس از خانه می ایستد، میخواهیم همین رو آزمایش کنیم. اگر تندی HSP2 را افزایش دهیم، سطح زیر نمودار تندی-زمان در گام نهایی بیشتر میشه. گام نهایی در زمان تندی کاهی پایانی هست که تندی موتور صفررمیشه و می ایسته. سطح زیر نمودار تندی-زمان هم میشه فاصله از جایگاه خانه، پس اگر تندی را افزایش دهیم، موتور دورتر از خانه می ایستد.

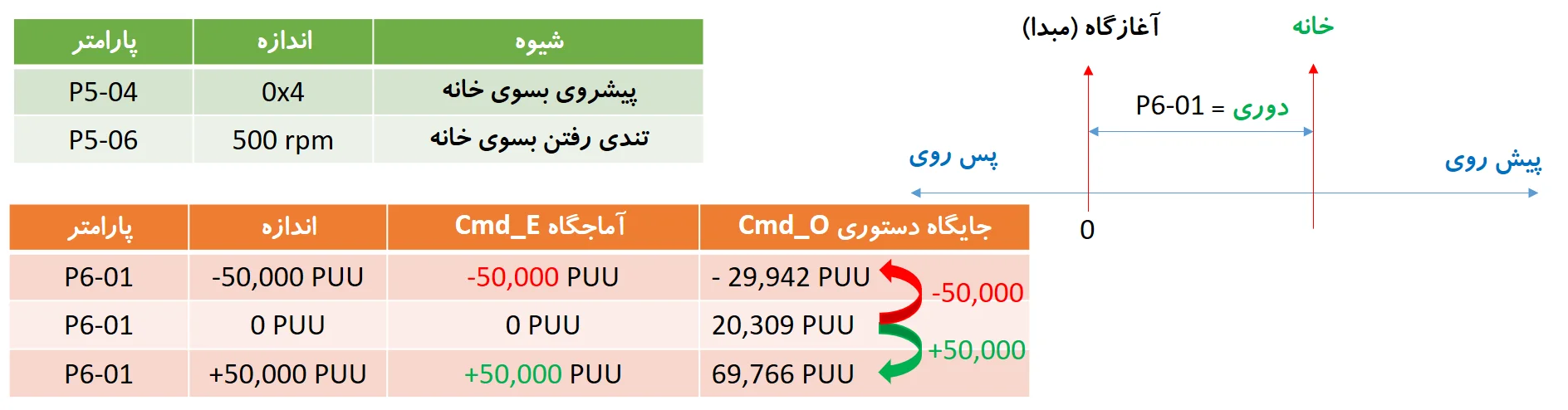
پارامتر P5-06 که تندی دوم هست رو دست کاری میکنیم و پس از انجام روند خانه، اندازه ی پارامتر های Cmd_E و Cmd_O را میبینیم. جایگاه هدف (Cmd_E) پس از روند خانه، مختصات خانه است، جایگاه خانه، جایی است که هنگام اتفاق افتادن پالس Z موتور آنجا بوده. جایگاه دستوری لحظه ای ( Cmd_O ) پس از انجام دستور خانه، جایگاهی است که موتور ایستاده، پایانی ترین جایگاهی که درایور به موتور دستور داده آنجا باشد.
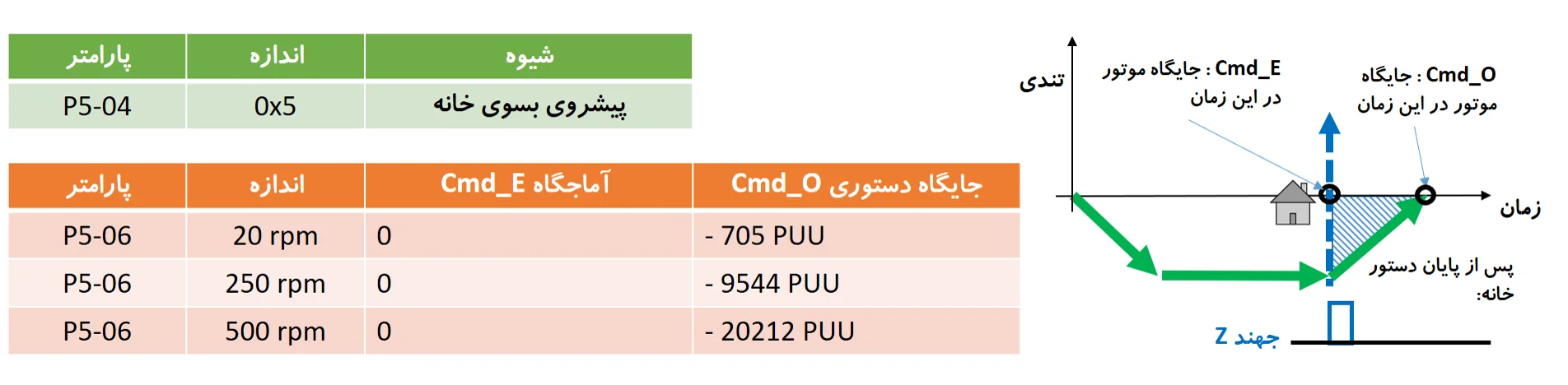
و اگر با P5-04 = 0x5 سوی رفتن را پسروی کنیم، اندازه های Cmd_O منفی میشود.
چرا جایگاه هدف صفر است؟ چون وقتی P6-01 =0 خانه همان مبدا است و مختصات مبدا هم صفر است، پس مختصات خانه هم صفر است.
چرا Cmd_O مثبت یا منفی میشود؟
اگر با پیشروی (رفتن بسوی جهت مثبت) به پالس برسیم ، پیش(جلو) خانه می ایستیم و مختصات جایگاه ایست، مثبت میشود. اگر با پسروی(رفتن بسوی منفی) به پالس برسیم، پس(عقب) خانه می ایستیم و مختصات جایگاه ایست، منفی میشود.
6- اندازه دهی مبدا با پارامتر P6-01
در این آزمایش P5-04 و P5-06 دست نمیخورند، اندازه های گوناگون بر P6-01 میگذاریم و پس از انجام روند خانه، اندازه های Cmd_E و Cmd_O را میخوانیم.
هر روند دو پارامتر داده و ویژگی دهی داشت، P6-01 پارامتر داده ی روند خانه است. اندازه ی آن، مختصات خانه است. برای نمونه اگر P6-01 = 100 باشد، خانه 100 PUU پیش(جلو) مبدا است. خانه یک جایگاه فیزیکی هست که گزینش کرده ایم،و با پارامتر P6-01 میتونیم بگیم که کجای محور باشه و اینجوری جایگاه خود مبدا دانسته میشه .
اگر در پیشروی به خانه تندی = 500 rpm باشد، جایگاه ایست(Cmd_O در پایان) ، نزدیک به 20,000 PUU جلوی خانه است، اگر مختصات خانه = -50,000 PUU ، موتور 20,000 PUU جلوی آن می ایستد که میشود -30,000 PUU .