در حالت کاری PR در سروو موتور دلتا، 64 کار از پیش نعیین شده داریم که به این 64 کار میگوییم 64 روند و میتوان هر یک از روند ها را انتخاب کرد تا اجرا شود و یا ترتیبی از روند ها رو ساخت که پشت سر هم اجرا شوند.

– روند ها در حالت کاری PR در سروو موتور دلتا
– آشنایی با پارامترهای وابسته به حالت کاری PR در سروو درایور دلتا
– گزینش روند و فرمان آغاز روند در سروو درایور دلتا
PUU یا یکای پالس کاربر
یکا؟ PUU یک یکا (واحد) برای اندازه گیری چرخش است، مانند درجه.
پالس ؟ یک پالس بفرستی به درایور، موتور 1PUU میچرخه. PUU گام چرخش است برای هر پالس.
کاربر؟ گزینش اندازه PUU بر دوش کاربر است.
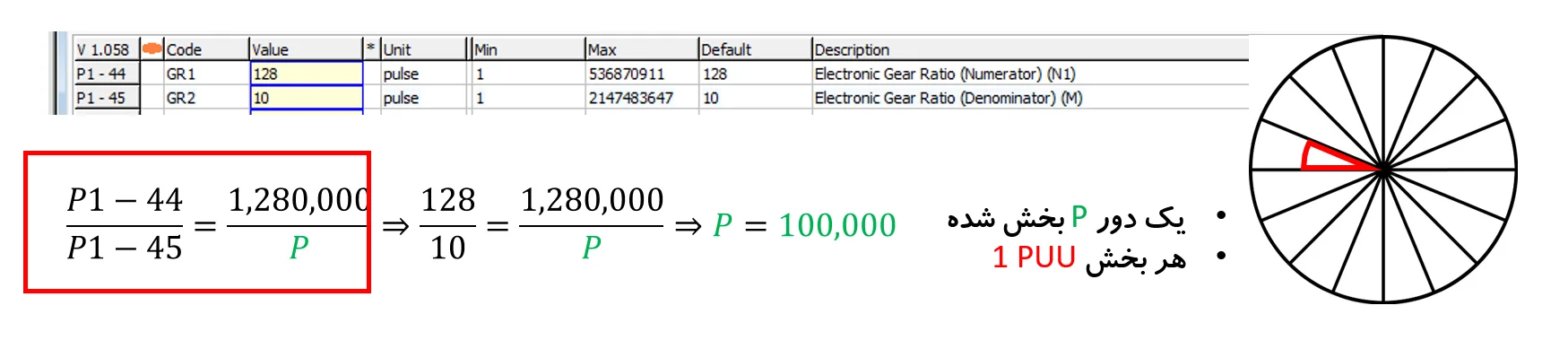
برای گزینش اندازه ی PUU، باید به درایور بگیم که یک چرخه چند بخش بشه. پندارید یک چرخه را P بخش کرده ایم. هر بخش یک PUU است.
P : شمار بخش ها در یک چرخه که با دو پارامتر اندازه گذاری میشود.
آشنایی با پارامتر های وابسته به حالت کاری PR در سروو موتور دلتا
هر روند (هر PR) دو پارامتر 32 بیتی دارد:
- پارامتر ویژگی دهی ( تعریف یا definition ) : دربردارنده ی گزینه ها یا ویژگی های روند هست.
- پارامتر داده : میتواند اندازه جایگاه یا … باشد.
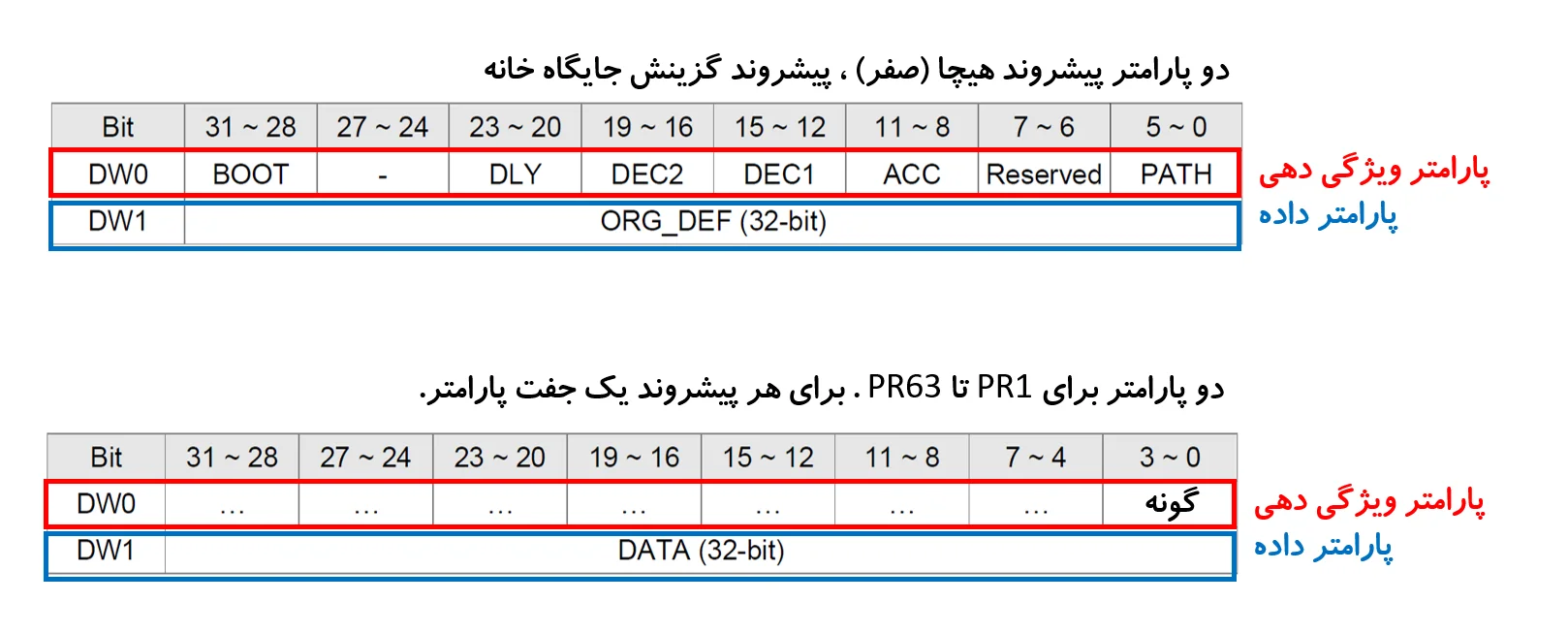
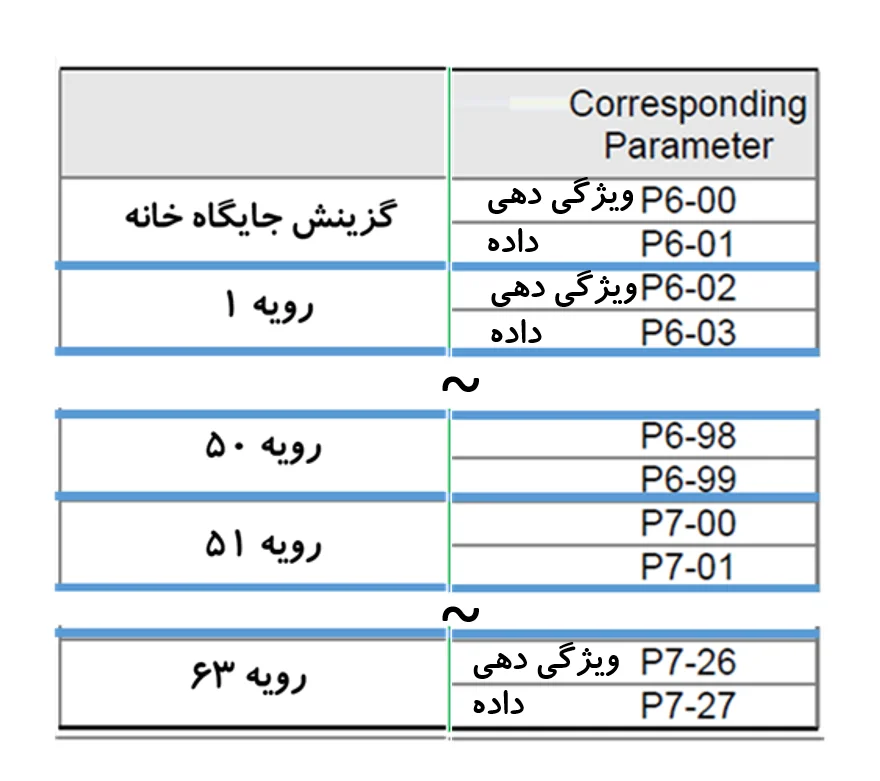
برای روند شماره 1 تا 63 (PR1 تا PR63 ) بسته به گونه روند، پارامتر ویژگی دهی و داده، 6 ساختار گوناگون دارند.
- روند صفر ، همیشه روند گزینش جایگاه خانه یا homing است.
- پارامتر ویژگی دهی روند گزینش جایگاه خانه P6-00 و پارامتر داده P6-01 است.
- پارامتر ویژگی دهی روند شماره یک P6-02 و پارامتر داده P6-03 است.
- …
- پارامتر ویژگی دهی روند شماره 63، پارامتر P7-26 و پارامتر داده P7-27 است.
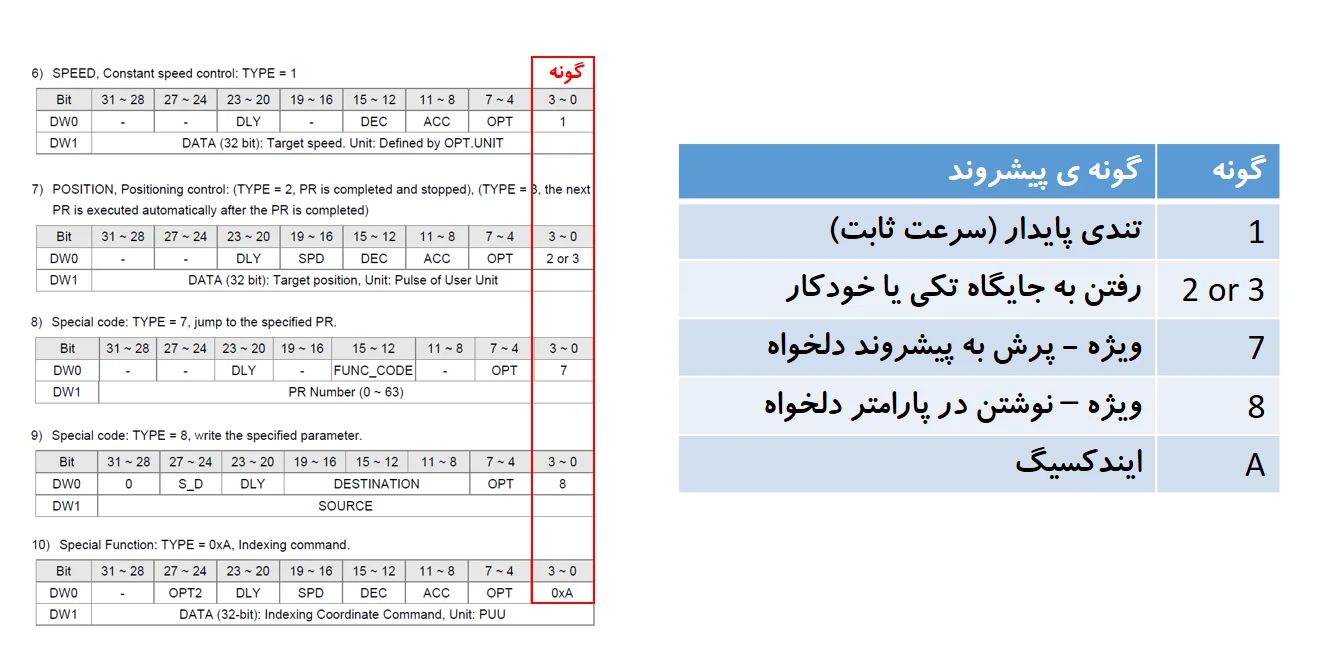
پارامتر ویژگی دهی روند رفتن به جایگاه (position control) را میبینید. برای اندازه دهی تندی (سرعت) تنها 4 بیت هست و تندی با شماره ای بین 0 تا F داده میشود. همینجور زمان های تندی افزایی (افزایش تندی =acceleration) و تندی کاهی (کاهش تندی = deceleration) و دیرکرد (delay) ، چگونه تندی با چهار بیت اندازه گذاری میشود؟
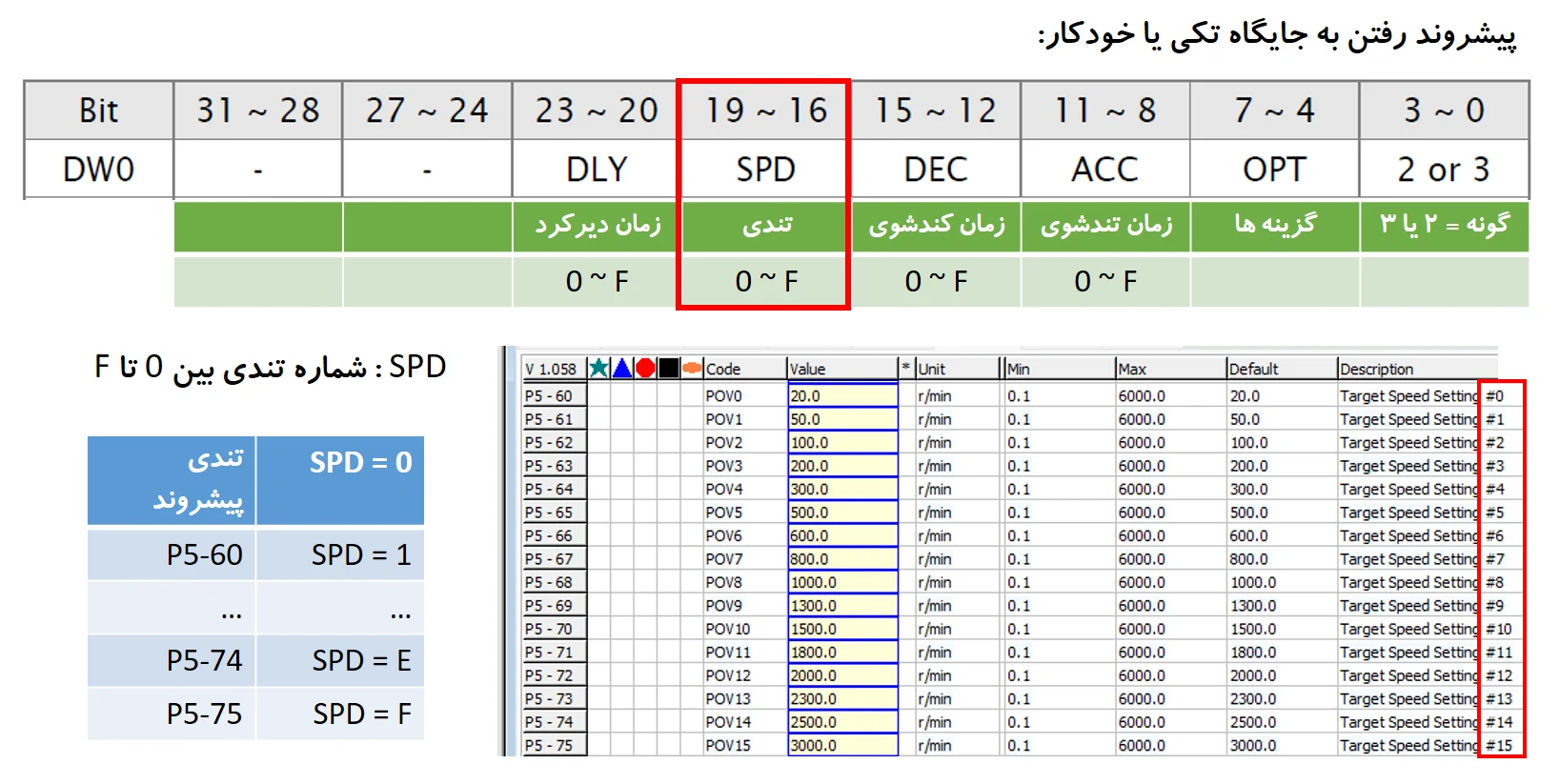
برای تندی 16 پارامتر هست ( P5-60 ~ P5-75 ) و 16 اندازه ی تندی رو با یکای r/min در این 16 پارامتر مینویسیم. برای تندی گذاری هر روند، با نوشتن شماره ای بین 0 تا F یا (0~15) در چهار بیت تندی، یکی از 16 اندازه ی تندی گزینش میشود.
- 16 اندازه ی تندی در 16 پارامتر ( P5-60 تا P5-75 ) نوشته میشود. برای گزینش تندی برای هر روند باید با نوشته شماره ای میان 0 تا 15 در بیت های SPD=0~F یکی از این پارامتر ها گزینش شود.
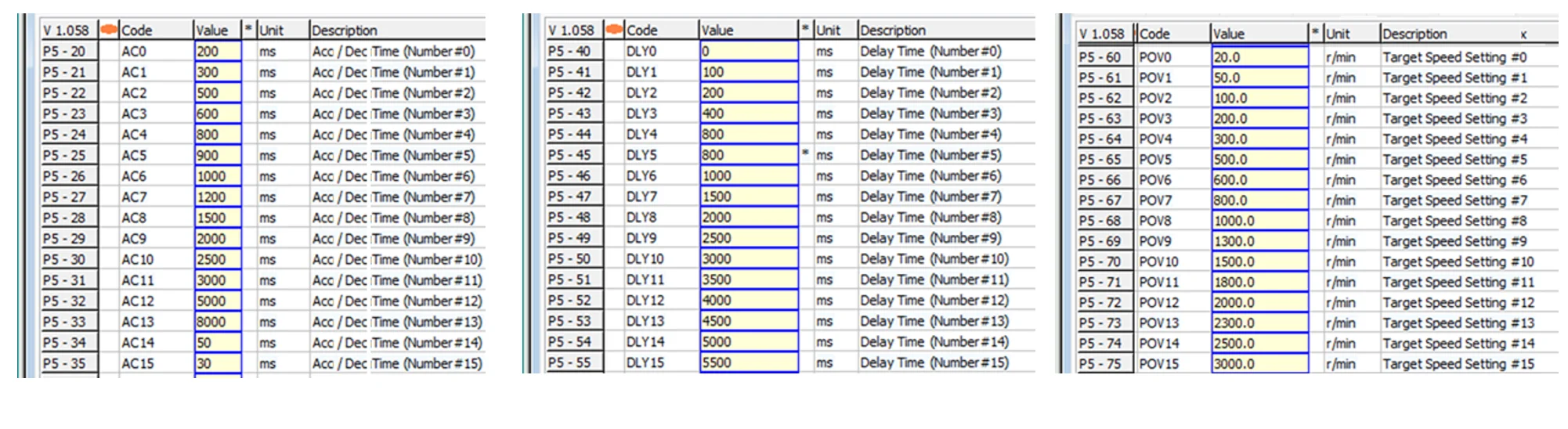
- 16 اندازه زمان برای تندی افزایی یا تندی کاهی در 16 پارامتر ( P5-20 تا P5-35 ) نوشته میشود. برای گزینش زمان تغییر تندی هر روند باید شماره از 0 تا 15 در بیت ها ACC/DEC نوشته شود (ACC/DEC=0~F) .
- 16 زمان دیرکرد در 16 پارامتر ( P5-40 تا P5-55 ) از پیش نوشته میشود. برای گزینش زمان دیرکرد هر روند باید شماره ای از 0 تا F در بیت های DLY نوشته شود (DLY=0~F).
اکنون میدانید 64 روند داریم و برای هر کدام دو پارامتر ویژگی دهی و داده هست و برای همه ی آنها هم 16 پارامتر برای تندی و 16 پارامتر زمان تغییر تندی و 16 پارامتر زمان دیرکرد داریم. برای روند صفر (PR0) یا گزینش جایگاه خانه، افزون بر دو پارامتر ویژگی دهی و اندازه، سه پارامتر دیگر نیز دست اندرکار تنظیمات هستند که در آینده باهاشون آشنا میشید.
گزینش روند و فرمان آغاز روند در حالت کاری PR در سروو موتور دلتا
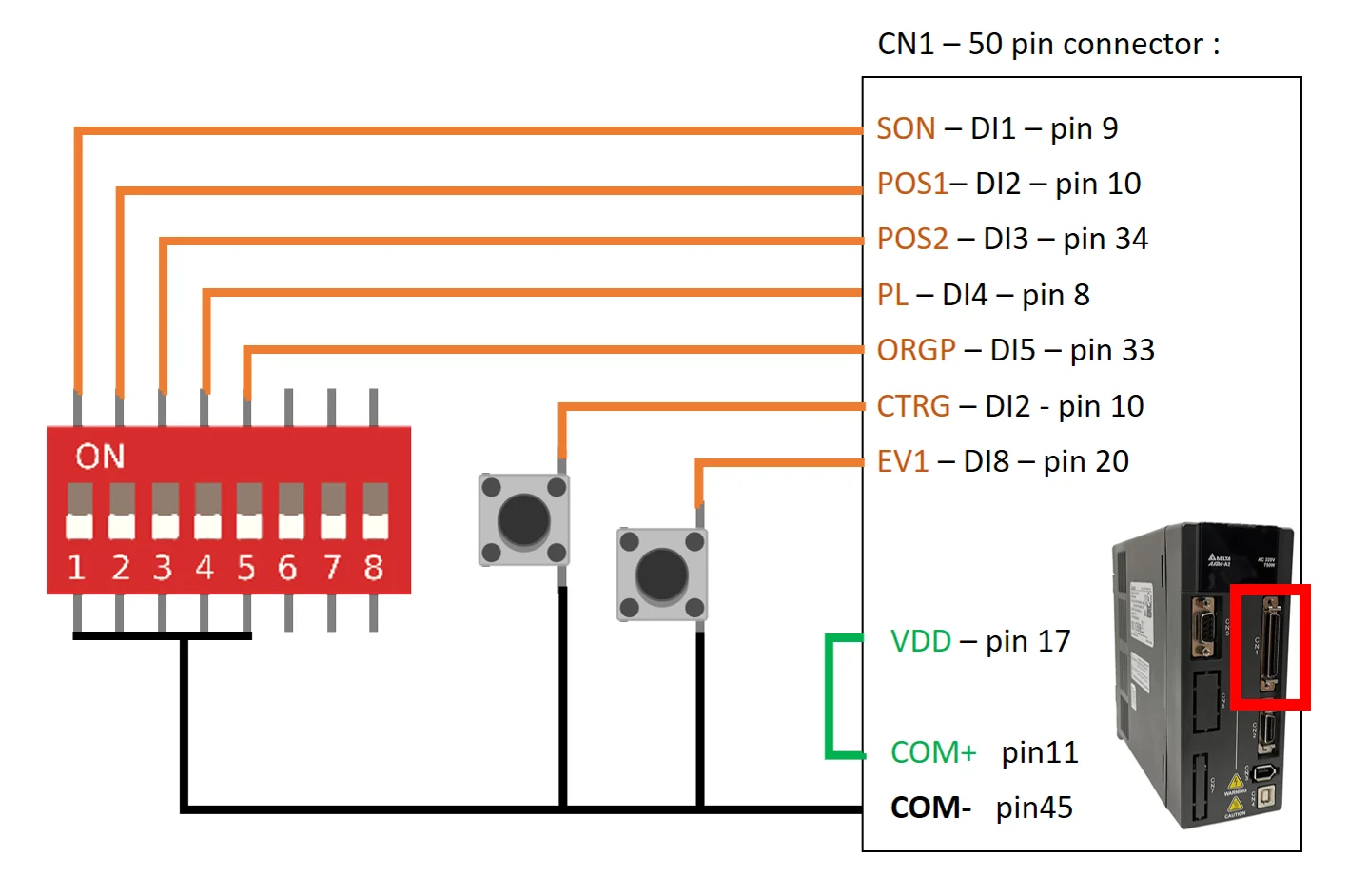
هدف این نوشته، آشنایی شما با حالت کاری PR است. و در آغاز یادگیری بی گمان این پرسش را دارید که چگونه به درایور میگوییم که کدام روند را کی آغاز کند؟ پنج روش برای فراخوانی روند ها داریم، در روش پایه ای که میتواند همه ی روند ها را فراخوانی کند، هفت پایه ی ورودی دیجیتال بکار گرفته میشود:
- کدام روند؟ بایستی شماره ای بین 0 تا 63 را با بکارگیری شش پایه ی ورودی دیجیتال POS0 تا POS5 به درایور بدهیم. اینجوری درایور میداند که باید کدام روند را آغاز کند.
- کی فراخوانی شود؟ لبه ی روشن شو روی پایه ی ورودی دیجیتال CTRG به درایور میگوید چه زمانی پیشروند گزینش شده با پایه های POS0 ~ POS5 را آغاز کند.

چکیده روش های فراخوانی روند ها در حالت کاری PR در سروو موتور دلتا :
- روش پایه ای : لبه روشن شو روی پایه ی ورودی CTRG، روند ای را که با پایه های POS0 ~ POS5 گزینش شده را آغاز میکند(با 6 پایه میتوان شماره ای از 0 تا 63 را گزینش کرد). با این روش هر کدام از 64 روند را میتوان فراخوانی کرد.
- ویژه : آغاز روند خانه با ورودی SHOM ، پایان دادن به هر پیشروند با درونبر STP.
- رویدادی (ایونت event ) : چهار رویداد لبه پایین رونده و چهار بالارونده میتواند فراخواننده ی روند ها باشد. با این روش تنها روند های از شماره ی 51 تا 63 میتواند فراخوانی شود.
- نرم افزاری : با نوشتن شماره ی روند در پارامتر P5-07 میتوان آن روند را فراخوانی کرد.
- دیگر: یک روش ویژه دیگر هم هست که در جای خودش میگم.
فراخوانی روند پس از دیگری در سروو موتور دلتا
اکنون میدانید که نخستین روند چگونه فراخوانی میشود، ولی پس از آن چگونه روند دیگری فراخوانی میشود؟
- برای روند خانه ( روند صفر یا PR0 ) ، در پارامتر ویژگی دهی در بیت های ” روند بعدی ” میتوان گزینش کرد که پس از آن هر یک از 63 روند فراخوانی شود.
- برای روند هایی که ویژگی خودکار آنها فعال شده، پس از پایان این روند ها، روند با شماره ی بعدی آغاز میگردد، برای نمونه اگر روند 5 خودکار، پس از پایان آن و سپری شدن زمان دیرکرد، روند 6 فراخوانی میگردد.
- با روند هایی میتوانیم به روند دیگری پرش کنیم.
تنظیم حالت کاری سروو درایور دلتا و سوی چرخش سروو موتور
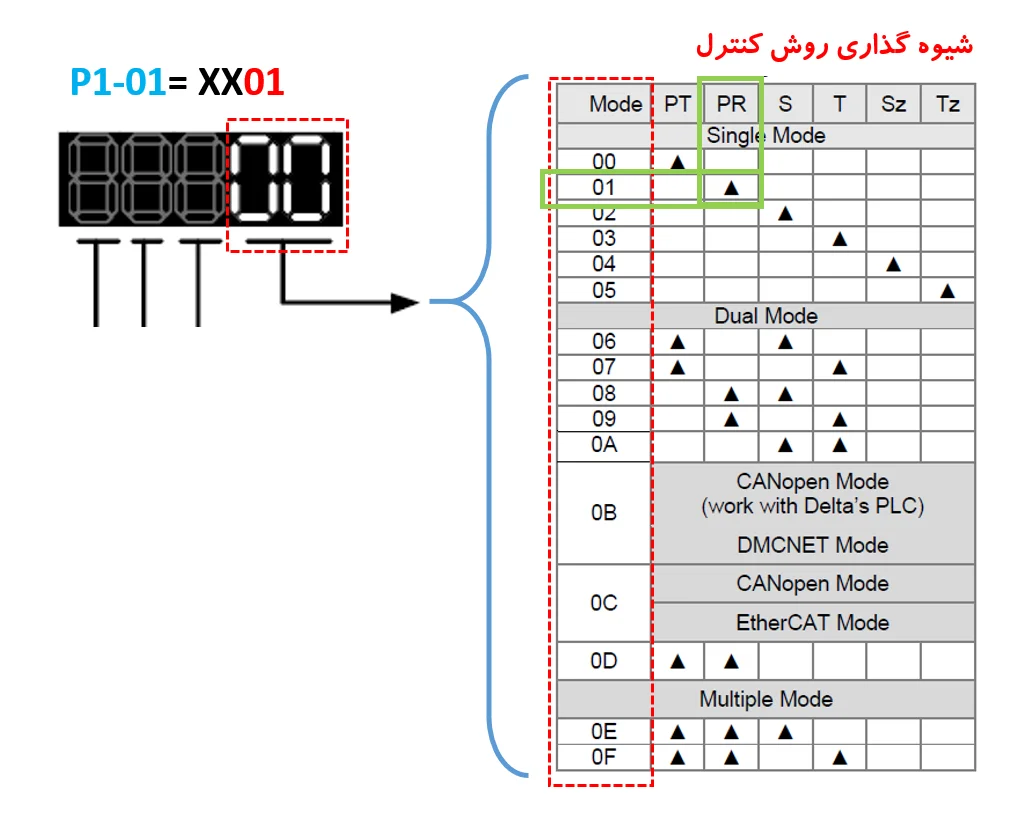
با یکان و دهگاه پارامتر P1-01 ، حالت کاری درایور، تنظیم میشود.
حالت کاری چیست؟ روش های کاری کنترل جایگاه PR و PT و کنترل تندی و کنترل گشتاور و … حالت های کاری های سروو درایور هستند .
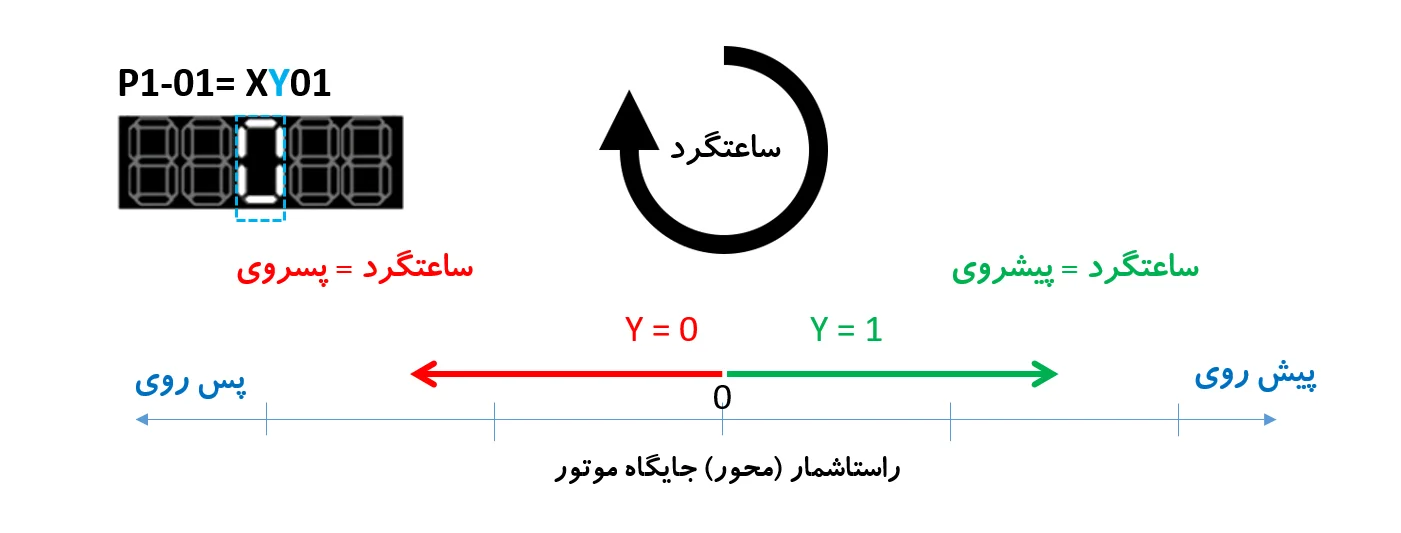
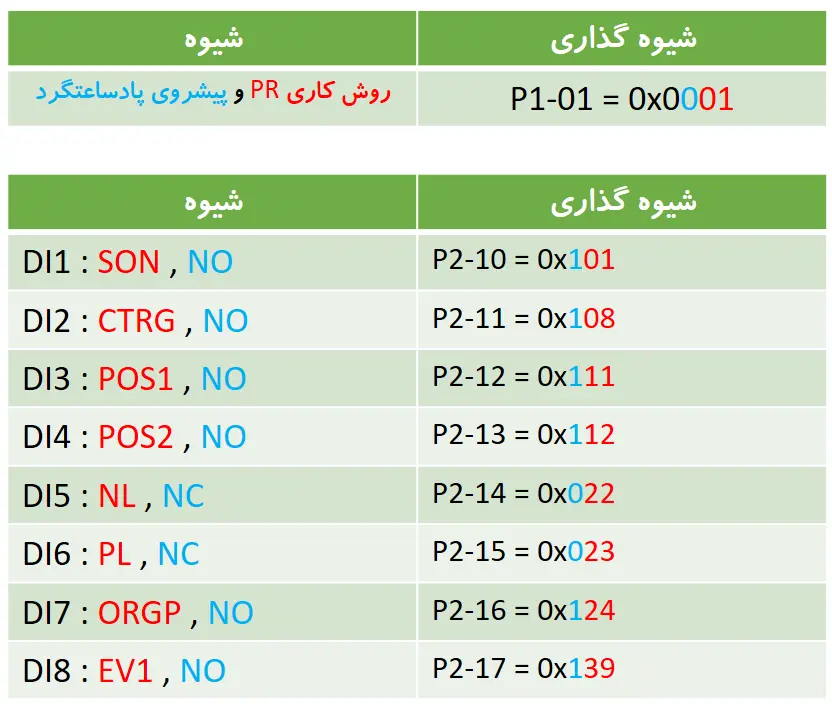
برای رفتن به حالت کاری PR، بایستی P1-01=XX01 باشد.
تنظیم سوی چرخش در سروو موتور دلتا
- پیشروی (حرکت فوروارد forward) به به معنی رفتن به سوی جایگاه های مثبت تر و افزایش جایگاه موتور است.
- پسروی (حرکت وارونه reverse ) به معنی رفتن بسوی جایگاه های منفی تر و کاهش جایگاه موتور است.
با صدگان پارامتر P1-01 گزینش می شود که پیشروی (افزایش عدد جایگاه موتور) ساعتگرد یا پادساعتگرد باشد.
- اگر صدگان Y=1 باشد، پیشروی ساعتگرد است.
- اگر صدگان Y=0 باشد، پیشروی پادساعتگرد است.
چینش آزمایشگاه سروو موتور دلتا
باید یک آزمایشگاه بچینیم چون در آینده میخواهیم رفتار های سروو موتور رو در حالت کاری PR آزمایش کنیم، من در آزمایشگاهم ابزار های زیر رو بکار گرفتم:
- سروو موتور و درایور دلتا A2 با توان 750W
- یک کامپیوتر با نرم افزار ASDA_SOFT
بستن سیم های برق سروو موتور و درایور دلتا
بر پایه ی عکس زیر، یا آموزش ویدئویی که پیوند بهش رو این زیر گذاشتم، سیم های برق موتور و درایور و کابل انکودر رو ببندید.
تنظیم پایه های ورودی دیجیتال آزمایشگاه سروو موتور دلتا
پایه های ورودی که در آزمایش های حالت PR بکارمیگیریم:
- سروو روشن(SON): برای روشن کردن سروو همیشه بهش نیاز داریم.
- فرمان آغاز(CTRG): در لبه ی بالارونده ی این پایه، روند گزینش شده با پایه های POS0~POS5، آغاز میگردد.
- روندگزین ها(POS0 ~POS5): 6 پایه نشانگر شماره ای بین 0 تا 63 ، که شماره ی روندی هست که میخواهیم آغاز شود.
- سنسور حد منفی NL : پایه ی حسگر جایگاهی که نمیخواهیم، موتور از آن پس تر با عقب تر برود ( نمیخواهیم عدد جایگاه موتور از عدد جایگاه NL کمتر بشود ) .
- سنسور حد مثبت PL : پایه ی حسگر جایگاهی که نمیخواهیم موتور از آن پیشتر یا جلوتر برود ( نمیخواهیم عدد جایگاه موتور از عددی که جایگاه سنسور حد مثبت است بیشتر شود) .
- حسگر ORGP: حسگر جایگاهی که بین حد مثبت و منفی است.
- رویداد فرمان آغاز 1 (EV1) : لبه بالارو یا پایینرو این پایه، فرمان آغاز روند از پیش گزینش شده است.
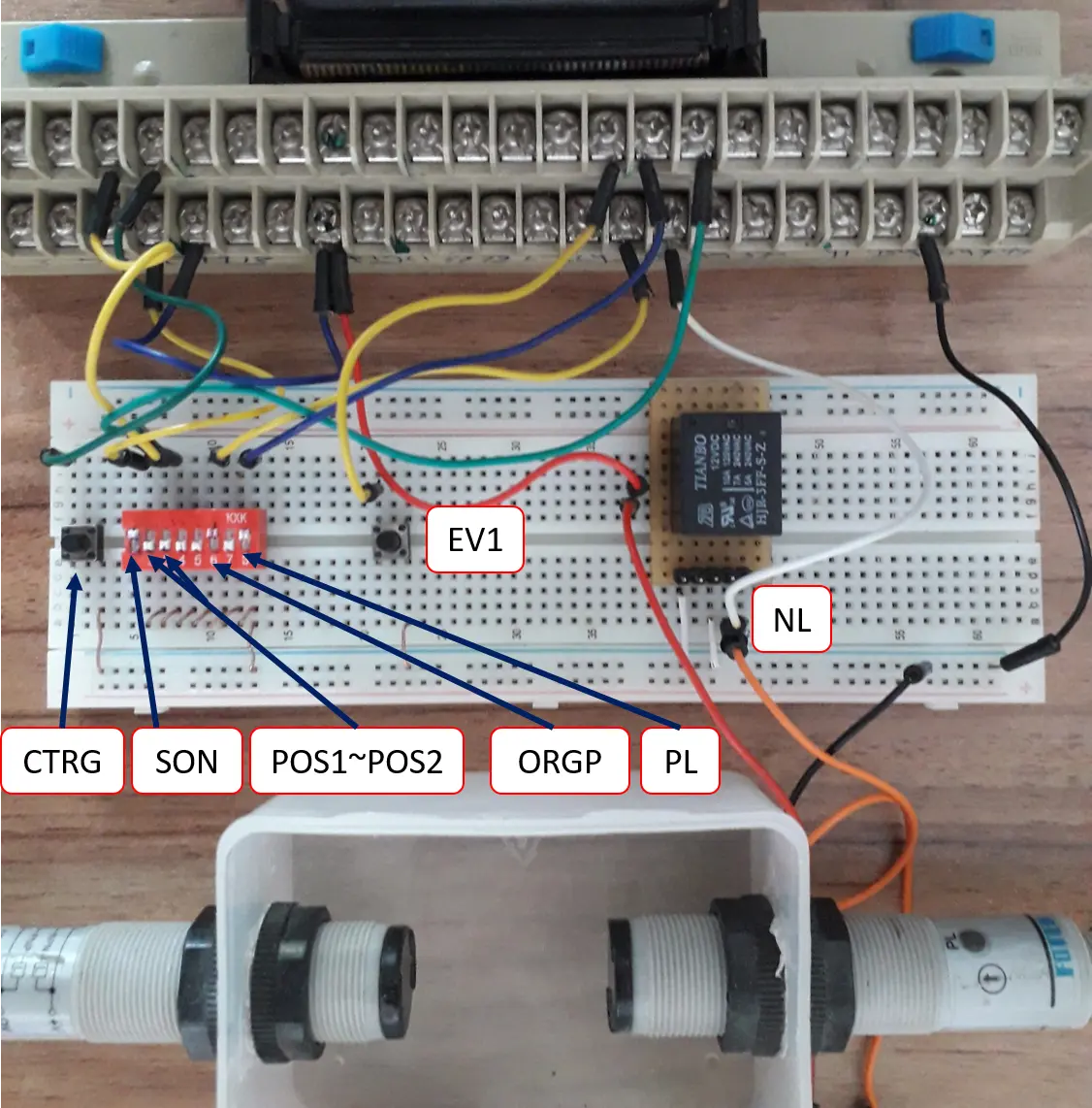
با سیم بندی که من انجام دادم، ورودی های سروو درایور هنگامی روشن میشوند که به زمین بسته شوند.

برای بستن این پایه های ورودی به زمین سه چیز بکار گرفتم.
- کلید فشاری برای پایه های CTRG و EV1 بکار بردم.
- سنسور نوری مجاورتی فوتک برای پایه ی NL بکار بردم.
- دیپ سوئیچ برای دیگر پایه ها بکار بردم.
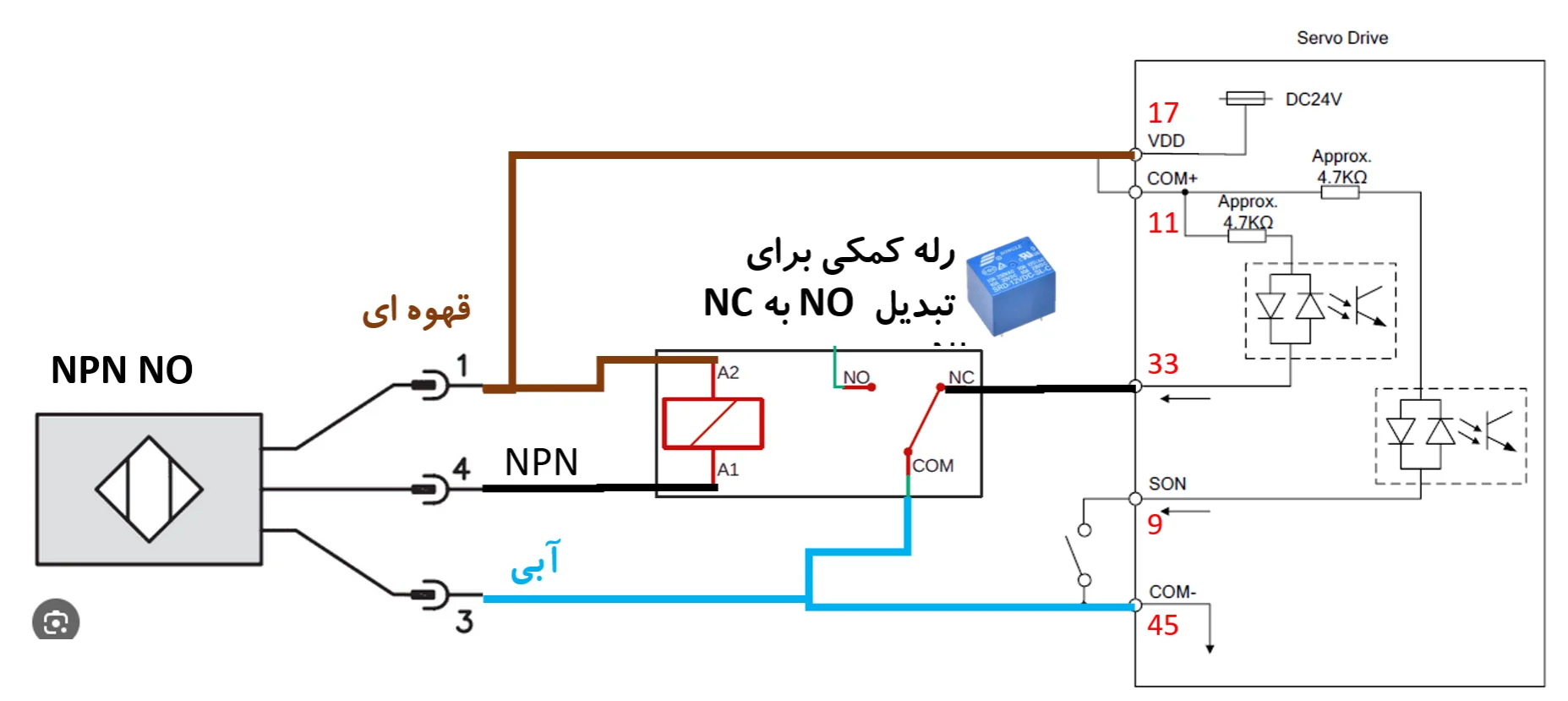
تغییر خروجی معمولی-باز سنسور مجاورتی به معمولی-بسته برای سروو درایور دلتا
چون پایه های سروو درایو برای روشن شدن باید به زمین بسته شوند، باید حسگر NPN بکارگرفت، چون PNP نمیتواند به زمین ببندد و تنها میتواند به VCC ببندد. همچنین چون پایه های NL و PL معمولی-بسته هستند، باید حسگر NPN NC بکارگرفت، چون من حسگر NO دارم، یک رله ی کمکی بکارمیگیرم، و با حسگر رله رو ، و با رله پایه ی سروو درایور رو روشن میکنم.
تنظیم پارامتر های حالت PR و پایه های ورودی برای سروو موتور دلتا
تا کنون سیم ها رو بستیم و در گام بعدی تغییر پارامتر ها رو برای تنظیمات اولیه مطابق جدول زیر انجام دهید. سپس برق درایور رو قطع و وصل کنید.
گام به گام فراخوانی یک روند در حالت PR در سروو موتور دلتا
همه ی کارها رو انجام دادیم، مونده اینکه خود روند ها رو تنظیم کنیم. در نوشته های آینده، یک یا چند روند رو تنظیم و فراخوانی میکنیم و کار سروو موتور رو میبینیم. برای آغاز یک روند :
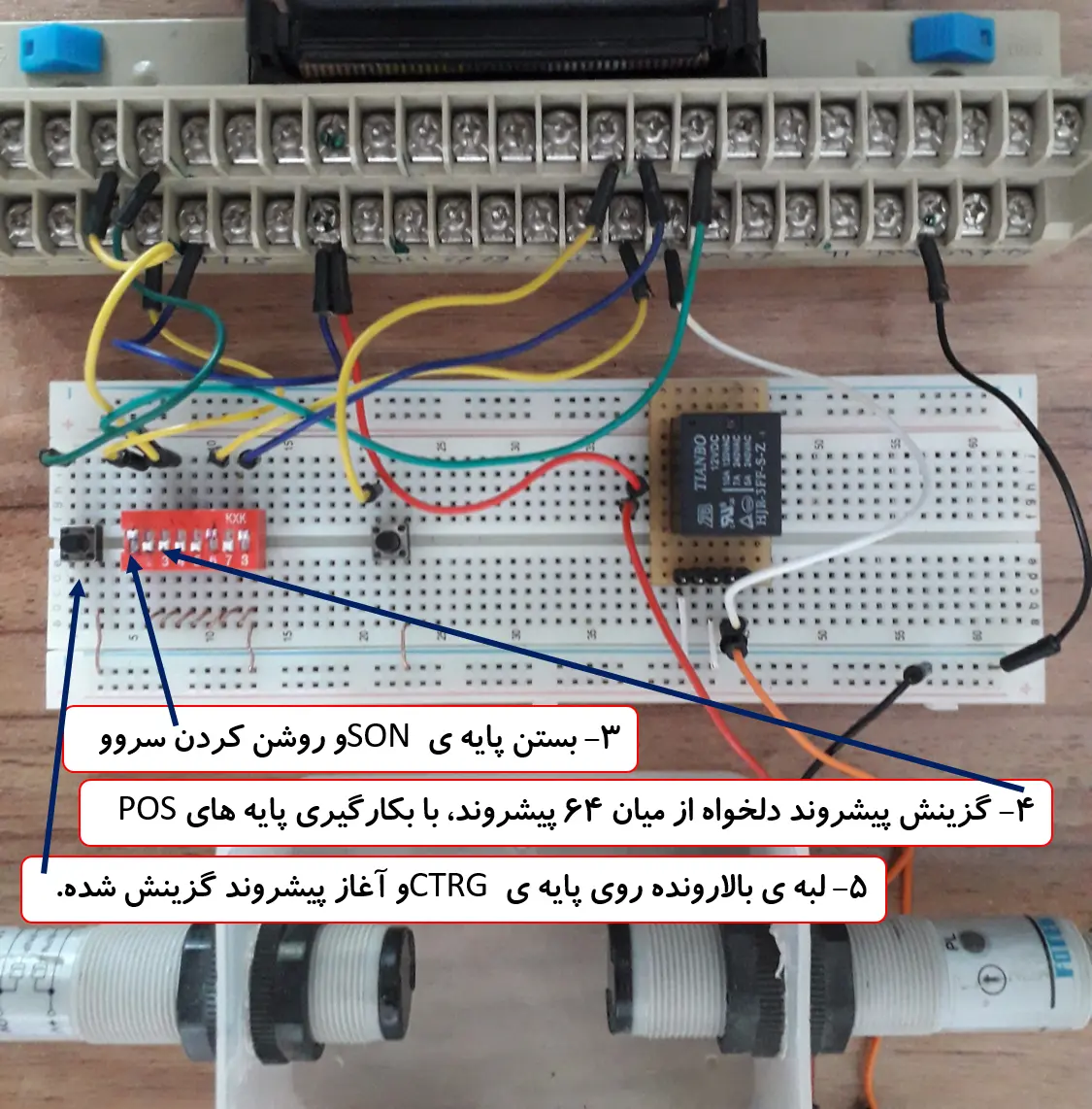
- گزینش روند دلخواه از میان 64 روند، با بکارگیری پایه های POS0~POS5 . چون تنها 2 تا از پایه های روندگزین رو بکارگرفتم، تنها میتونم چهار روند رو گزینش کنم.
- بستن پایه ی SON و روشن کردن سروو موتور.
- لبه ی بالارونده روی پایه ی CTRG و آغاز روند گزینش شده.